Laberinto de pared+#
El patio de juegos Wall Maze+ ocupa una cuadrícula que mide 5000 milímetros por 5000 milímetros.
La posición inicial del VR MazeBot está en la coordenada (-2100, -2100).
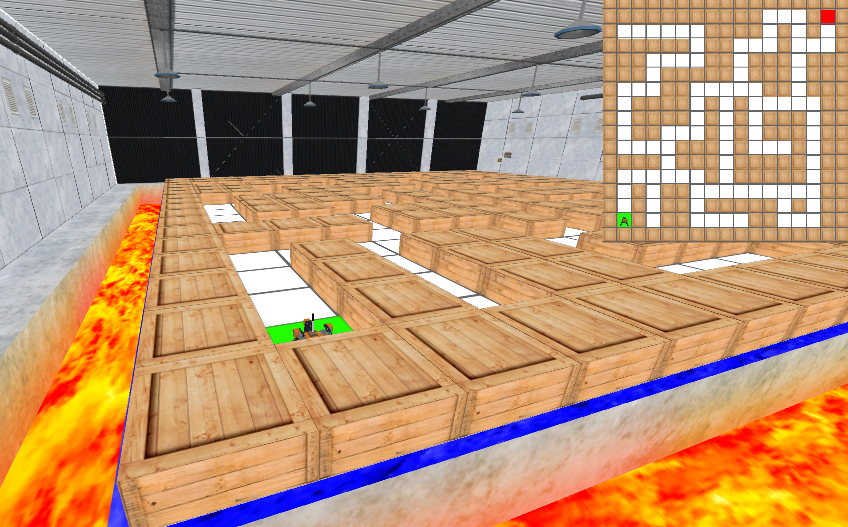
Cada cuadrado dentro de la cuadrícula del Laberinto de Paredes+ está espaciado 300 milímetros entre sí.
Atributos del robot de realidad virtual#
El patio de juegos Wall Maze+ utiliza la configuración VR MazeBot.
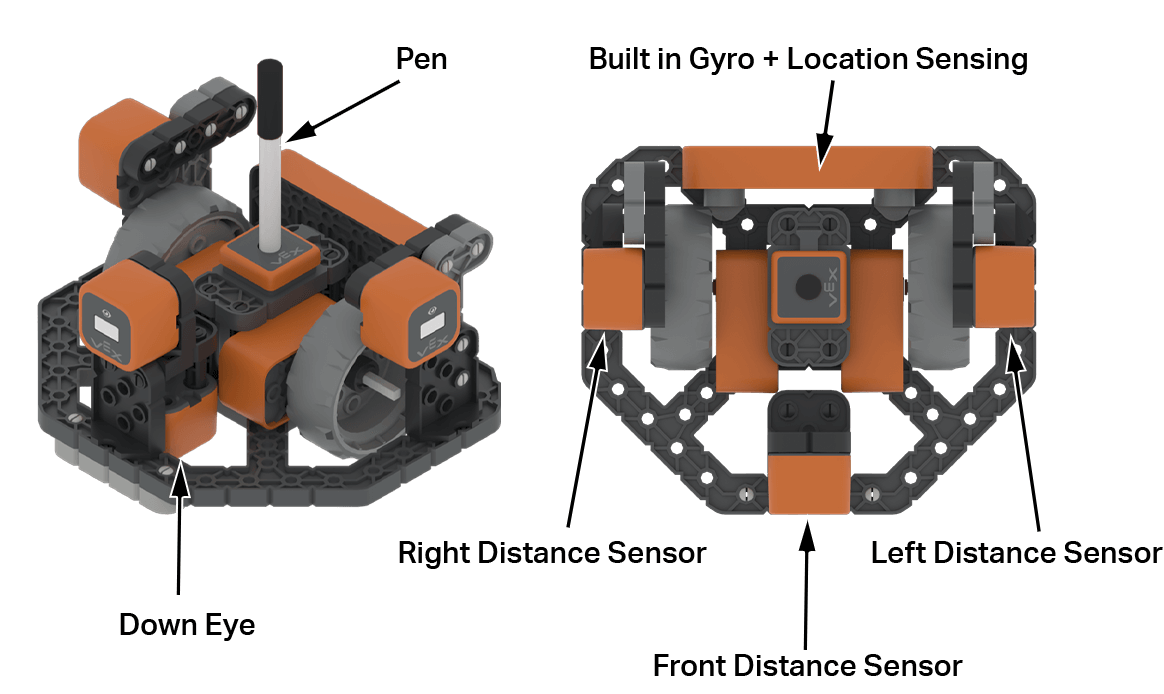
El VR MazeBot mide aproximadamente 95 milímetros de largo y 117,5 milímetros de ancho.
En comparación con el robot de RV estándar, la velocidad predeterminada del MazeBot de RV es el doble. Esta velocidad adicional le permite recorrer laberintos más rápido.
Configuración |
Descripción |
Documentación de la API |
Nombre del comando de Python |
|---|---|---|---|
Transmisión |
El robot Wall Maze+ tiene acceso a un sistema de transmisión estándar 2x2 con un sensor giroscópico incorporado para rastrear el rumbo y el ángulo de rotación del robot VR. |
|
|
Lápiz de realidad virtual |
El robot tiene acceso a la herramienta VR Pen estándar. |
|
|
Sensor ocular |
El robot solo tiene acceso al sensor ocular inferior. |
|
|
Sensor de distancia |
El robot tiene acceso a los sensores de distancia frontal, izquierdo y derecho. |
|
|
Sensor de ubicación |
El robot tiene acceso a un sensor de ubicación que puede informar su posición actual. |
|