Bloques específicos del robot#
Todos los bloques VEXcode VR estándar están disponibles para su uso en el patio de juegos V5RC Virtual Skills - Spin Up.
Movimiento#
Los bloques de este patio de juegos tendrán acceso a los parámetros IntakeMotorGroup y ArmMotorGroup para todos los bloques de movimiento.
Al seleccionar una dirección para los bloques de movimiento, intake hará girar el grupo de motores hacia adelante y outtake hará girar el grupo de motores en reversa.
Spin#
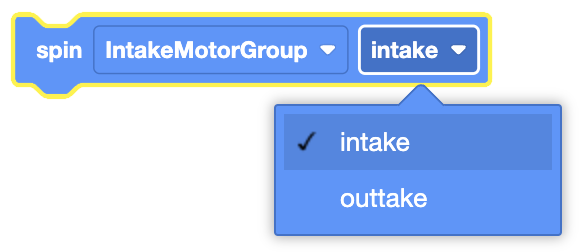
El bloque Spin se utiliza para girar un motor indefinidamente.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
girar [IntakeMotorGroup v] [consumo v]
Seleccione qué motor utilizar.
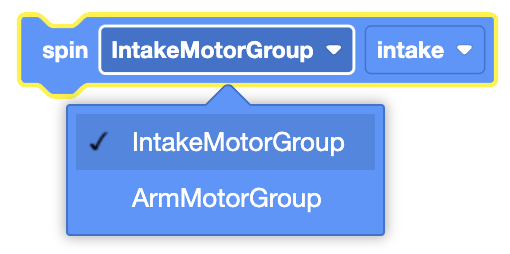
Seleccione en qué dirección se moverá el motor.
En este ejemplo, los motores de admisión girarán en la dirección de admisión durante 1 segundo antes de detenerse.
cuando empezó
girar [IntakeMotorGroup v] [consumo v]
esperar (1) segundos
parada [IntakeMotorGroup v]
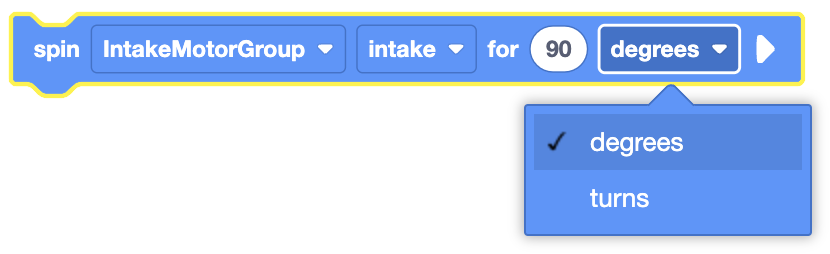
Spin for#
El bloque Girar por se utiliza para girar un motor durante una distancia determinada.
Este puede ser un bloque sin espera o en espera dependiendo de si se utiliza la opción y no esperar.
girar [IntakeMotorGroup v] [consumo v] por [90] [grados v] ▶
Seleccione qué motor utilizar.
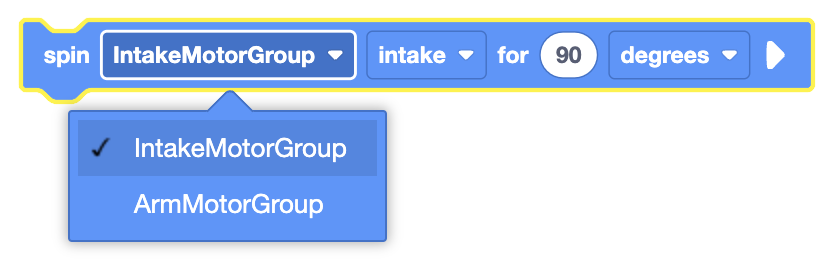
Seleccione en qué dirección se moverá el motor.
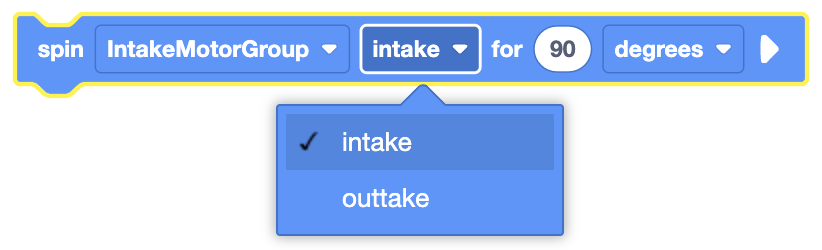
Establezca la distancia que girará el motor ingresando un valor y eligiendo la unidad de medida (grados o vueltas).
Por defecto, el bloque Girar durante bloqueará la ejecución de los bloques subsiguientes hasta que finalice. Al expandir el bloque Girar durante para mostrar y no esperar, los bloques continuarán ejecutándose mientras el motor esté en movimiento.
girar [IntakeMotorGroup v] [consumo v] por [90] [grados v] ◀ y no esperes
En este ejemplo, los motores de admisión girarán en la dirección de admisión durante 1 vuelta.
cuando empezó
girar [IntakeMotorGroup v] [consumo v] por [1] [giros v] ▶
Spin to position#
El bloque Girar a posición se utiliza para girar un motor a una posición establecida.
Este puede ser un bloque sin espera o en espera dependiendo de si se utiliza la opción y no esperar.
girar [IntakeMotorGroup v] a la posición [90] [grados v] ▶
Seleccione qué motor utilizar.
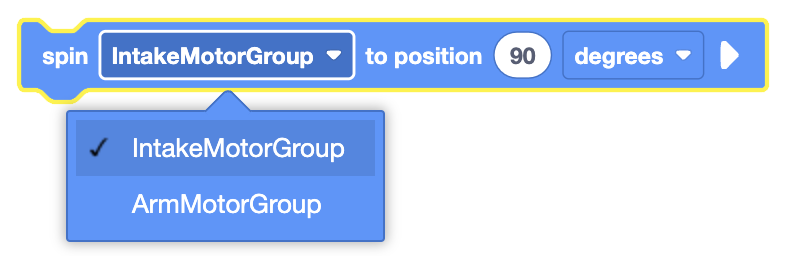
Establezca la distancia que girará el motor ingresando un valor y eligiendo la unidad de medida (grados o vueltas).
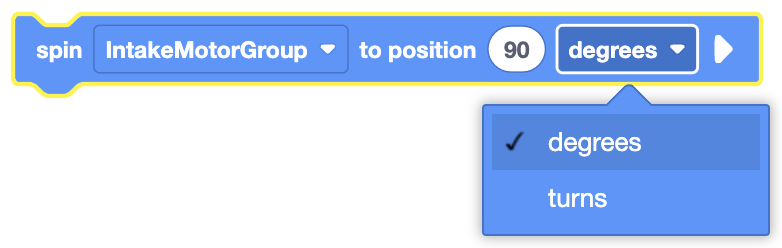
Por defecto, el bloque Girar a posición bloqueará la ejecución de los bloques subsiguientes hasta que finalice. Al expandir el bloque Girar a posición para mostrar y no esperar, los bloques continuarán ejecutándose mientras el motor esté en movimiento.
girar [IntakeMotorGroup v] a la posición [90] [grados v] ◀ y no esperes
En este ejemplo, el motor girará a la posición de 270 grados.
cuando empezó
girar [IntakeMotorGroup v] a la posición [270] [grados v] ▶
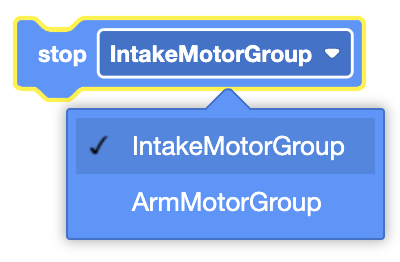
Stop Motor#
El bloque Detener motor se utiliza para detener el movimiento del motor.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
parada [IntakeMotorGroup v]
Seleccione qué motor utilizar.
En este ejemplo, los motores de admisión girarán en la dirección de admisión durante 1 segundo antes de detenerse.
cuando empezó
girar [IntakeMotorGroup v] [consumo v]
esperar (1) segundos
parada [IntakeMotorGroup v]
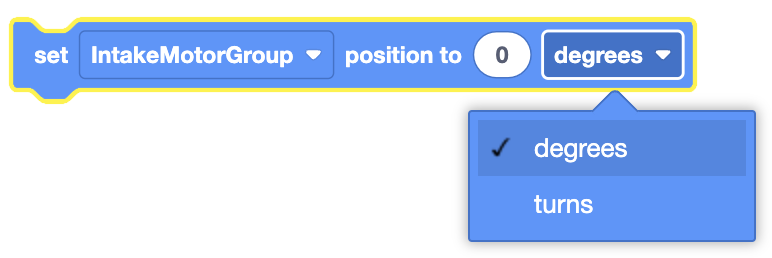
Set Motor position#
El bloque Establecer posición del motor se utiliza para establecer la(s) posición(es) del codificador de un motor en el valor ingresado.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
Establezca la posición [IntakeMotorGroup v] en [0] [grados v]
Seleccione qué motor utilizar.

Establezca la unidad de medida a utilizar, grados o vueltas.
En este ejemplo, la posición del codificador del motor se establece en 90 grados antes de que el motor gire a la posición de 0 grados.
cuando empezó
Establezca la posición [IntakeMotorGroup v] en [90] [grados v]
girar [IntakeMotorGroup v] a la posición [0] [grados v] ▶
Set Motor velocity#
El bloque Establecer velocidad del motor se utiliza para establecer la velocidad de un motor.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
Establezca la velocidad [IntakeMotorGroup v] en [50] [% v]
Seleccione qué motor utilizar.
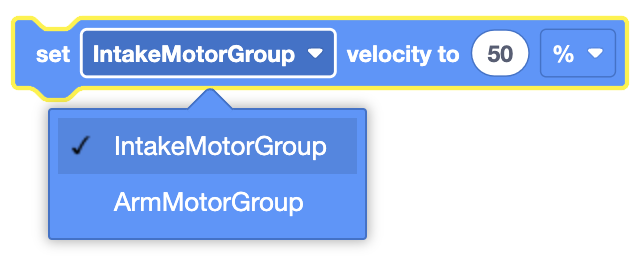
El bloque Establecer velocidad del motor aceptará un rango de -100% a 100%.
En este ejemplo, la velocidad del motor se establece al 75 % antes de girar 1 vuelta en la dirección de admisión.
cuando empezó
Establezca la velocidad [IntakeMotorGroup v] en [75] [% v]
girar [IntakeMotorGroup v] [consumo v] por [1] [giros v] ▶
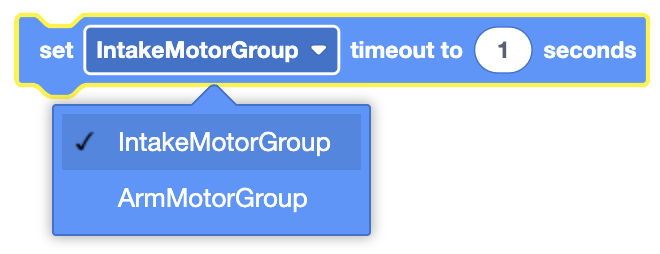
Set Motor timeout#
El bloque Establecer tiempo de espera del motor se utiliza para establecer un límite de tiempo para los bloques de movimiento del motor.
Esto evita que los bloques de movimiento que no alcanzan su posición prevista impidan la ejecución de los bloques subsiguientes.
Este es un comando sin espera y permite que cualquier comando posterior se ejecute sin demora.
Establezca el tiempo de espera [IntakeMotorGroup v] en [1] segundo
Seleccione qué motor utilizar.
En este ejemplo, el tiempo de espera del motor se establece en 2 segundos antes de girar el motor durante 3 vueltas en la dirección de salida.
cuando empezó
Establezca el tiempo de espera [IntakeMotorGroup v] en [2] segundo
girar [IntakeMotorGroup v] [descartar v] por [3] [giros v] ▶
Detección#
Disco tiene acceso a los bloques estándar de cerebro, transmisión, parachoques y detección de distancia.
Se ha cambiado el nombre de Detección ocular a Detección óptica para que coincida con el sensor óptico frontal.
Motor Sensing#
El motor está listo#
El bloque Motor listo se utiliza para informar si el motor o el grupo de motores seleccionado ha completado su movimiento.
<[IntakeMotorGroup v] ¿está hecho?>
Seleccione qué motor o grupo de motores utilizar.
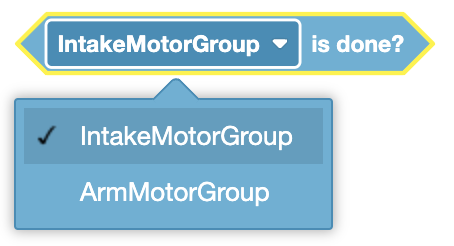
The Motor is done block reports True when the selected Motor or Motor Group has completed its movement.
The Motor is done block reports False when the selected Motor or Motor Group has not completed its movement.
El bloque Motor terminado se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, se levantará el brazo para que el sensor de distancia pueda informar la distancia del objeto más cercano.
cuando empezó
[Raise the Arm out of the way of the Front Distance Sensor.]
girar [ArmMotorGroup v] a la posición [1000] [grados v] ◀ y no esperes
[Wait until the Arm has finished moving.]
esperar hasta <[ArmMotorGroup v] ¿está hecho?>
[Print the distance between the Front Distance Sensor and the closest object in front of it.]
imprimir ([FrontDistance v] distancia del objeto en [mm v]) ▶
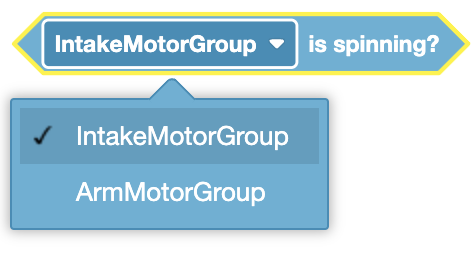
El motor está girando#
El bloque El motor está girando se utiliza para informar si el motor o el grupo de motores seleccionado se está moviendo.
<[IntakeMotorGroup v] esta girando?>
Seleccione qué motor o grupo de motores utilizar.
The Motor is spinning block reports True when the selected Motor or Motor Group is moving.
The Motor is spinning block reports False when the selected Motor or Motor Group is not moving.
El bloque El motor está girando se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el brazo se elevará mientras el grupo de motores de admisión todavía está en movimiento.
cuando empezó
[Take a Block into the Intake.]
girar [IntakeMotorGroup v] [consumo v] por [90] [grados v] ◀ y no esperes
[Execute Blocks while the Intake Motor Group is still moving.]
mientras <[IntakeMotorGroup v] esta girando?>
[Move the Arm to a position of 1000 degrees.]
girar [ArmMotorGroup v] a la posición [1000] [grados v] ◀ y no esperes
fin
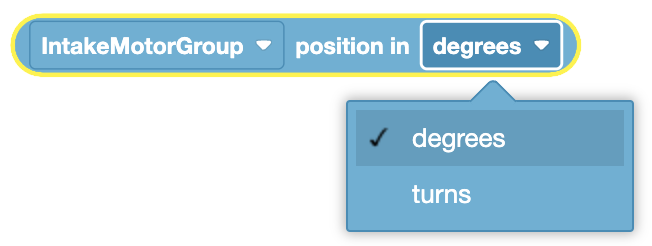
Posición del motor#
El bloque Posición del motor se utiliza para informar la posición de un motor o del primer motor de un grupo de motores.
([IntakeMotorGroup v] posición en [grados v])
Seleccione qué motor o grupo de motores utilizar.
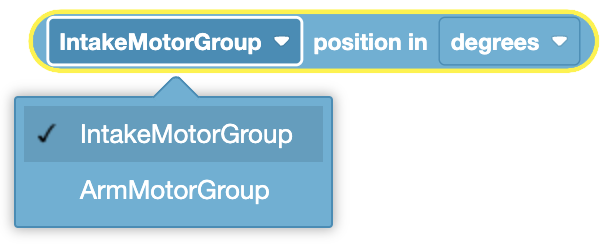
Seleccione cuándo utilizar la unidad, grados o vueltas.
El bloque Posición del motor se utiliza en bloques con espacios circulares.
En este ejemplo, el robot imprimirá la posición actual del grupo de motores del brazo.
cuando empezó
imprimir ([ArmMotorGroup v] posición en [grados v]) ▶
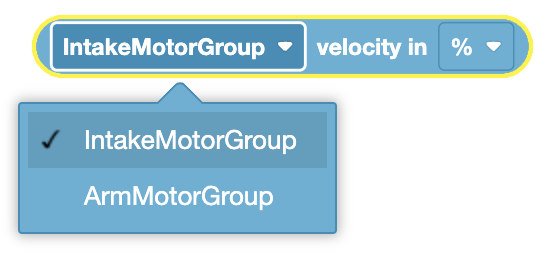
Velocidad del motor#
El bloque Velocidad del motor se utiliza para informar la velocidad actual de un motor o del primer motor de un grupo de motores.
([IntakeMotorGroup v] velocidad en [% v] :: custom-motion)
Seleccione qué motor o grupo de motores utilizar.
El bloque Velocidad del motor se utiliza en bloques con espacios circulares.
En este ejemplo, el robot imprimirá la velocidad actual del grupo de motores de admisión.
cuando empezó
imprimir ([IntakeMotorGroup v] velocidad en [% v] :: custom-motion) ▶
Posición GPS#
El bloque Posición GPS se utiliza para informar el desplazamiento posicional del punto de referencia de giro del robot con respecto al centro de un campo.
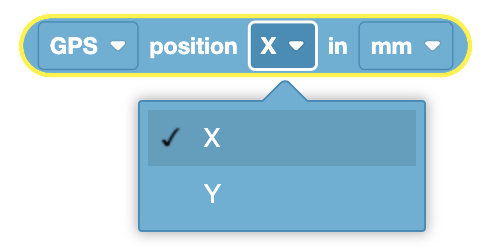
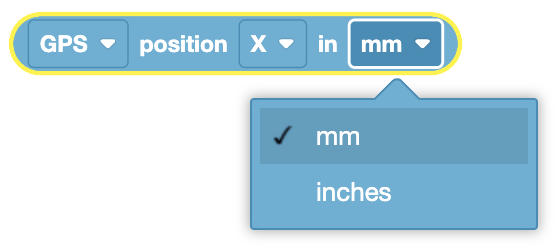
([GPS v] posición [X v] en [mm v])
Seleccione el desplazamiento del eje X o Y del punto de referencia de giro del robot desde el centro del campo a informar.
Seleccione en qué unidad desea informar el valor de desplazamiento, milímetros (MM) o pulgadas.
El bloque Posición GPS se utiliza en bloques con espacios circulares.
En este ejemplo, el robot imprimirá el desplazamiento Y actual del punto de referencia de giro del robot.
cuando empezó
imprimir ([GPS v] posición [X v] en [mm v]) ▶
rumbo GPS#
El bloque Rumbo GPS se utiliza para informar el rumbo que enfrenta actualmente un robot en función de las lecturas de un sensor GPS del código de campo GPS VEX.
El rumbo GPS informa un rango de 0,00 a 359,99 grados.
([GPS v] rumbo en grados)
El bloque Encabezado GPS se utiliza en bloques con espacios circulares.
En este ejemplo, el robot imprimirá el rumbo GPS actual.
cuando empezó
imprimir ([GPS v] rumbo en grados) ▶
Detección de seguimiento de línea#
Line Tracker Reflectivity#
El bloque Reflectividad del rastreador de línea se utiliza para informar la cantidad de luz reflejada mediante el sensor Rastreador de línea.
El bloque Reflectividad del Rastreador de Línea informará un rango de 0% a 100%. Las superficies con colores más claros tienen valores de reflectividad más altos, mientras que las superficies más oscuras tienen valores de reflectividad más bajos.
([BottomLineTracker v] reflectividad en %)
Elija qué sensor de seguimiento de línea utilizar.
![]()
En este ejemplo, el robot imprimirá la reflectividad actual con el sensor Top Line Tracker.
cuando empezó
imprimir ([BottomLineTracker v] reflectividad en %) ▶