Robot Details#
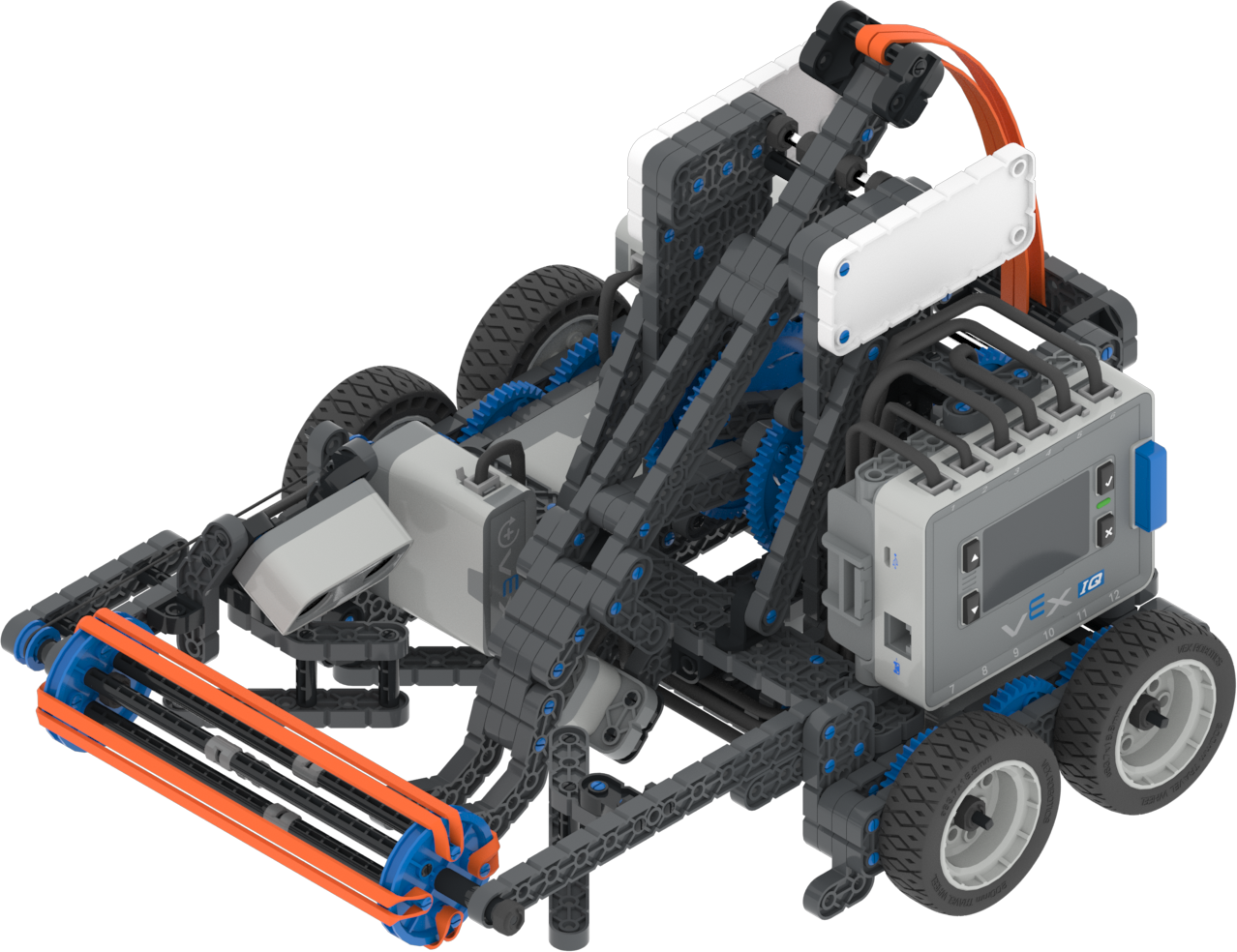
The VIQRC Virtual Skills - Pitching In Playground uses the standard VEX IQ Hero Bot, Fling.
The Fling VEX IQ Hero Bot measures approximately 350 millimeters long and 280 millimeters wide.
Motor Groups#
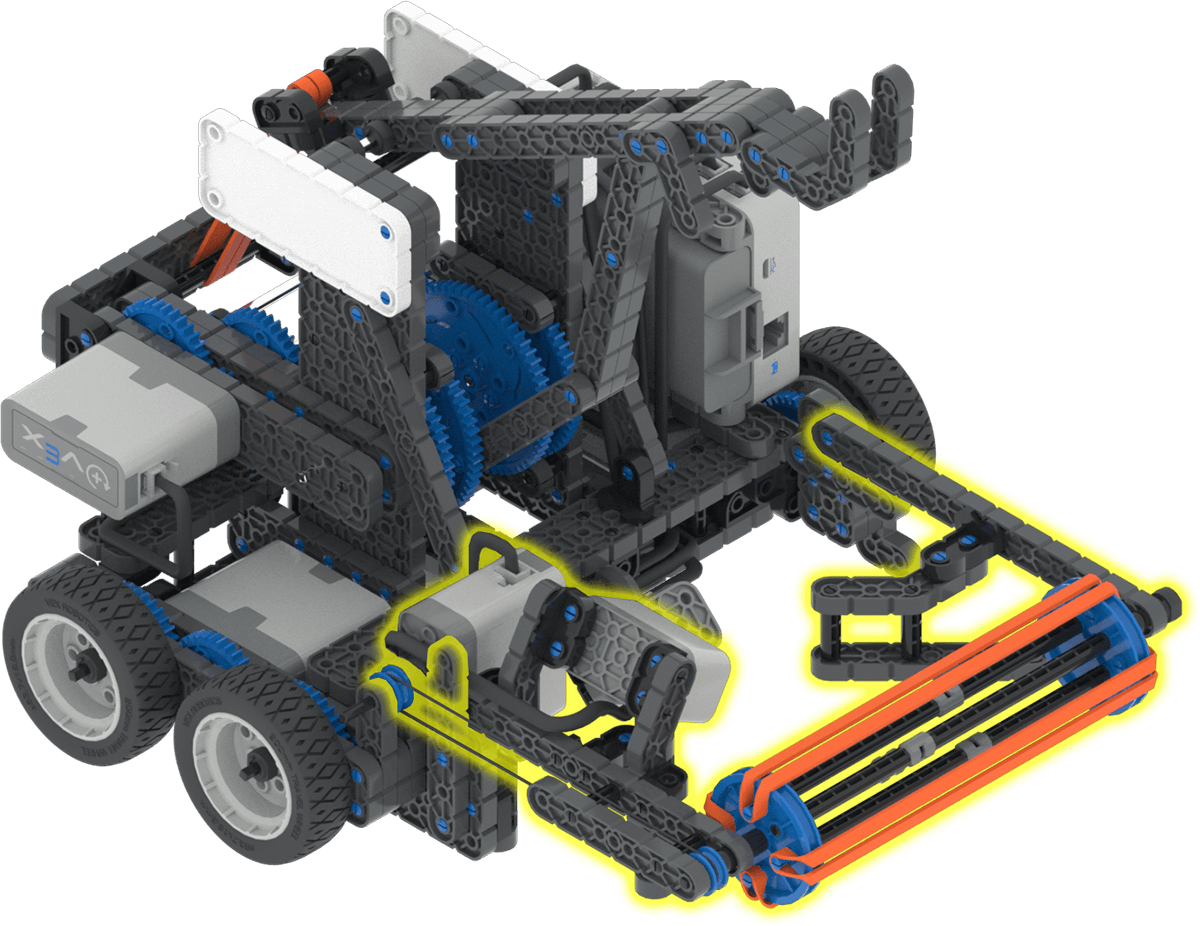
Fling is equipped with two Motors for its Arm and Intake.
Configuration & |
Description |
API Documentation |
|---|---|---|
|
The Arm allows the robot to take in Balls to be launched by the Catapult Arm, or reverse the intake (reversing the intake is also called the outtake) to spin the Balls out and away from the intake. The Intake Motor starts at 0 degrees and will collect a Disc when spun forward for 180 degrees, and score or drop a Block when spun in reverse for 180 degrees. |
|
|
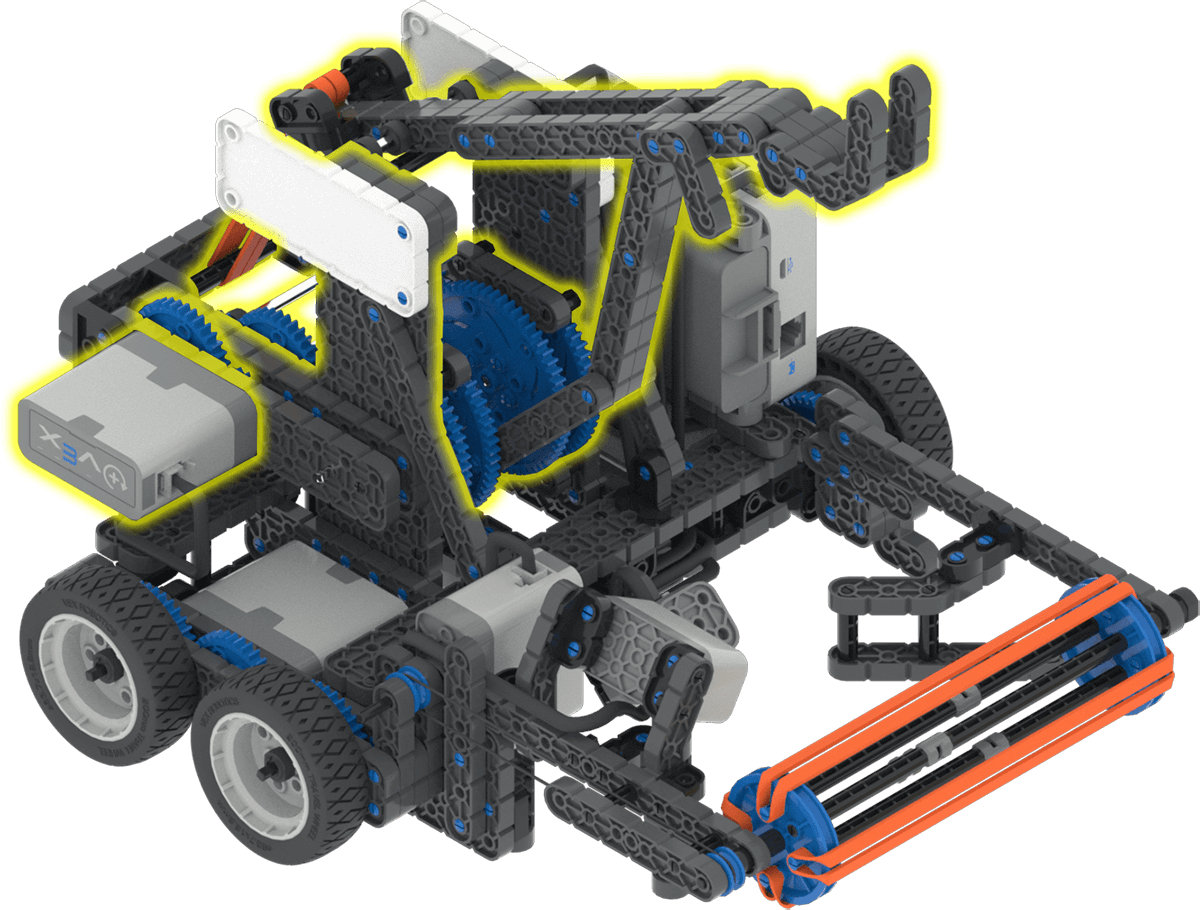
The Catapult Motor allows the robot to launch Balls into the goals and score a low hang from the Hanging Bar. The Catapult Motor starts at 0 degrees in the air. To make the Catapult Arm will be leveled out at 2600 degrees, and all the way to the ground at 5000 degrees. |
|
|
The Catapult Arm Tension Motor This allows the robot to launch Balls different distances across the Field. The Catapult Motor starts at 0 degrees in the air. The default tension is set to 90 degrees. |
Sensors#
Fling has access to the following sensors for autonomous coding:
Configuration |
Description |
API Documentation |
Python Command Name |
|---|---|---|---|
Brain Timer |
The Robot has access to a built-in timer. |
|
|
Drivetrain |
The Robot has access to a Drivetrain with a built-in Inertial Sensor to track the Robot’s current heading and angle of rotation. |
|
|
Front Distance |
Reports if an object is close to the sensor, as well as the approximate distance from the front of the sensor to an object, in millimeters or inches. |
|
|
Color |
Reports an object’s color, hue value, grayscale value, and proximity. This can detect if the robot drives over the black lines on the virtual field. |
|
|
Intake Bumper |
Reports when a Block is loaded in the Intake. |
|