机器人详细信息#
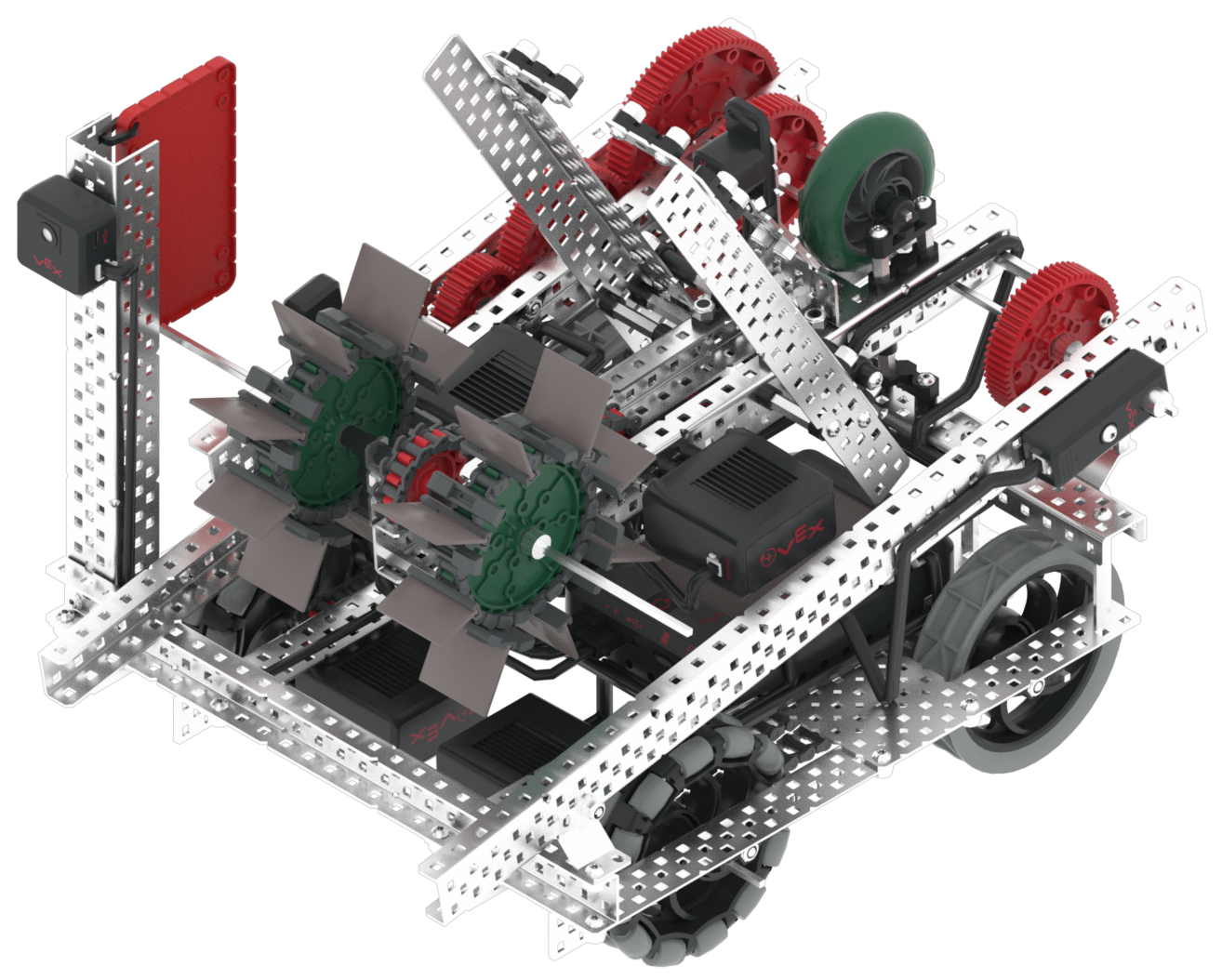
V5RC 虚拟技能 - Over Under 游乐场使用标准 VEX V5 英雄机器人Striker。
Striker VEX V5 Hero Bot 长约 350 毫米,宽约 280 毫米。
汽车集团#
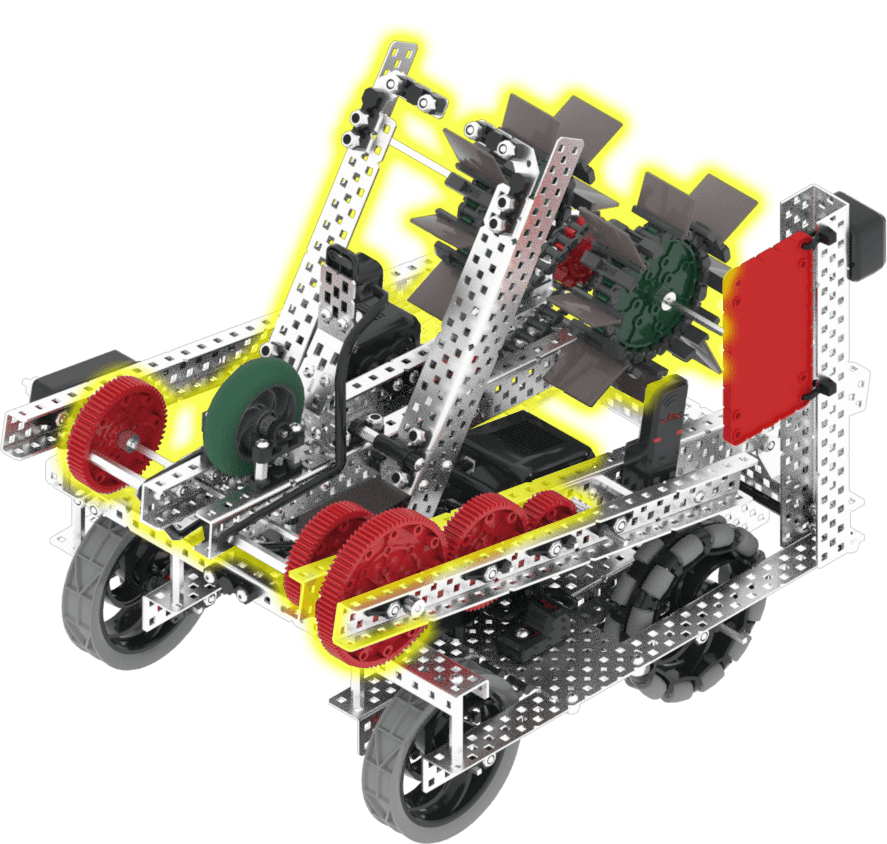
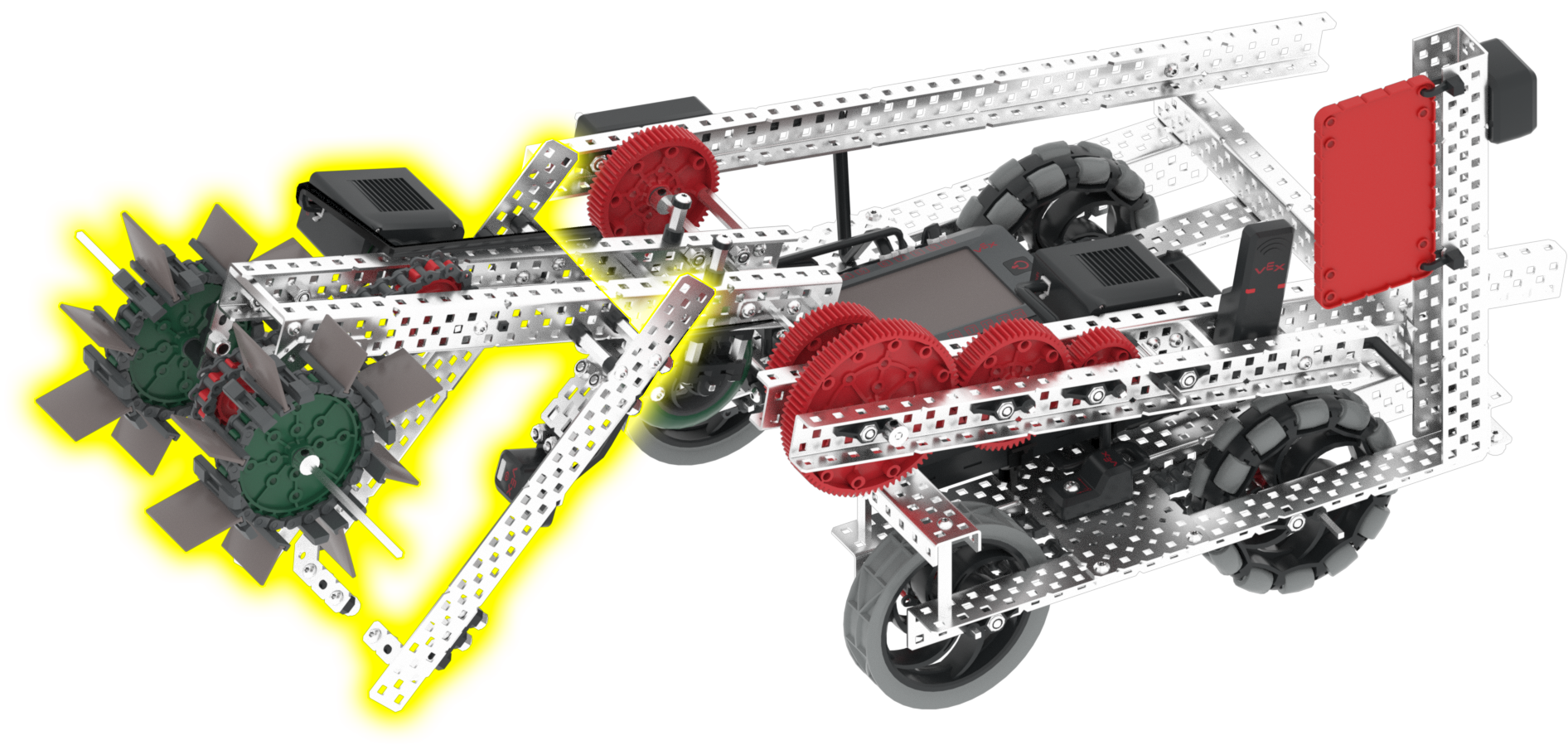
Striker 为其手臂和进气口配备了两套发动机组。
配置 & |
描述 |
API 文档 |
|---|---|---|
|
机械臂可以升降。这使得机器人可以执行诸如运输游戏对象之类的操作。默认情况下,机械臂起始角度为 0 度,向前旋转 1200 度后,机械臂将完全放下。 |
|
|
进气口可以正向和反向旋转。这使得机器人能够收集游戏物品并得分。进气口正向旋转 360 度时会收集一个三重球,反向旋转 360 度时会得分或掉落一个三重球。 |
传感器#
Striker 可以使用以下传感器进行自主编码:
配置 |
描述 |
API 文档 |
Python 命令名称 |
|---|---|---|---|
大脑计时器 |
机器人可以使用内置计时器。 |
|
|
传动系统 |
机器人可以使用带有内置惯性传感器的传动系统来跟踪机器人的当前航向和旋转角度。 |
|
|
光学的 |
报告物体是否靠近传感器,如果是,则报告该物体的颜色。 |
|
|
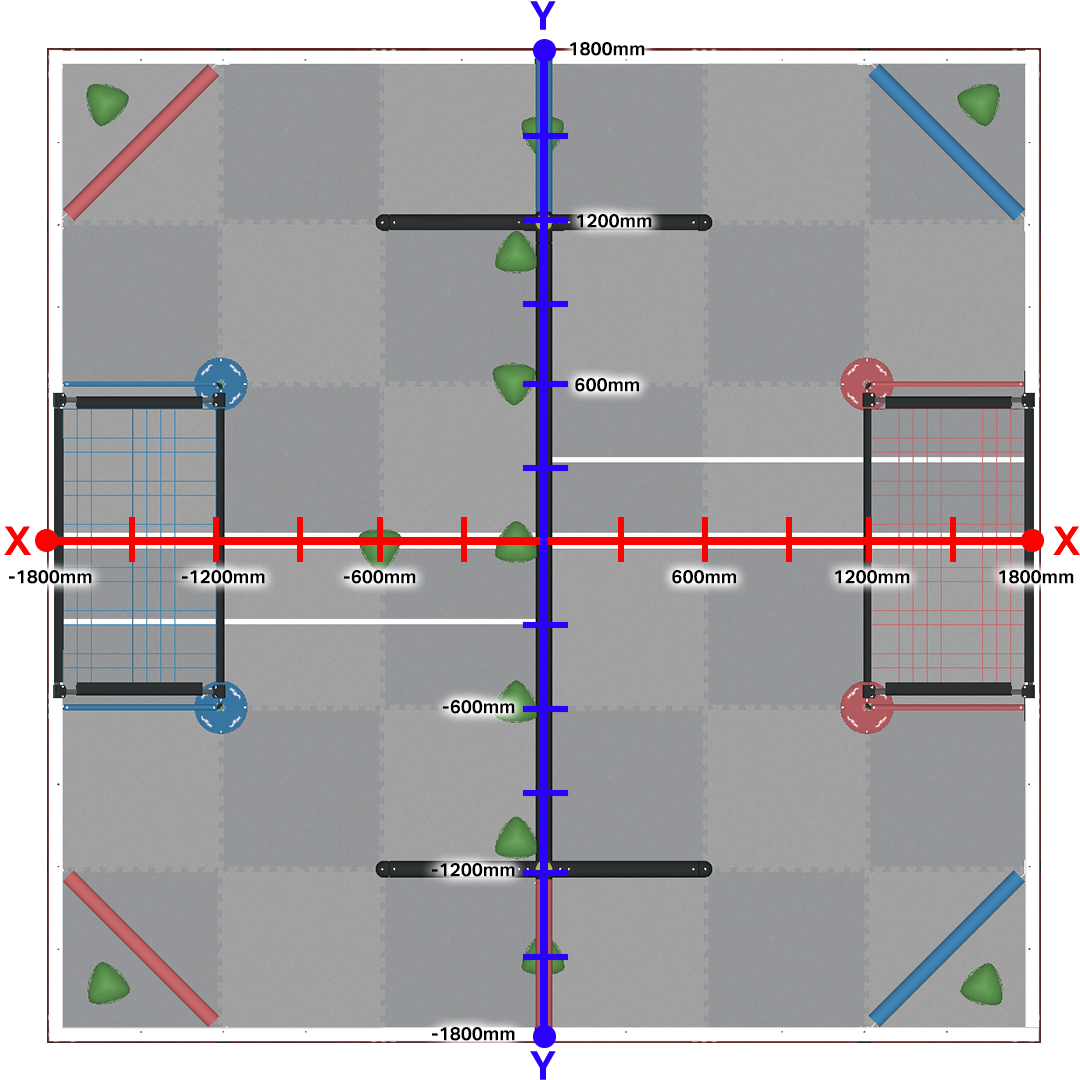
全球定位系统 |
报告 Striker 旋转中心的当前 X 和 Y 位置(以毫米或英寸为单位)。GPS 传感器还可以报告当前航向(以度为单位)。 |
|
GPS 传感器依靠笛卡尔坐标系进行导航,其中场的中间为 (0, 0)。