墙壁迷宫+#
**墙壁迷宫+**游乐场占据一个尺寸为 5000 毫米 x 5000 毫米的方形网格。
VR MazeBot的起始位置在坐标(-2100, -2100)。
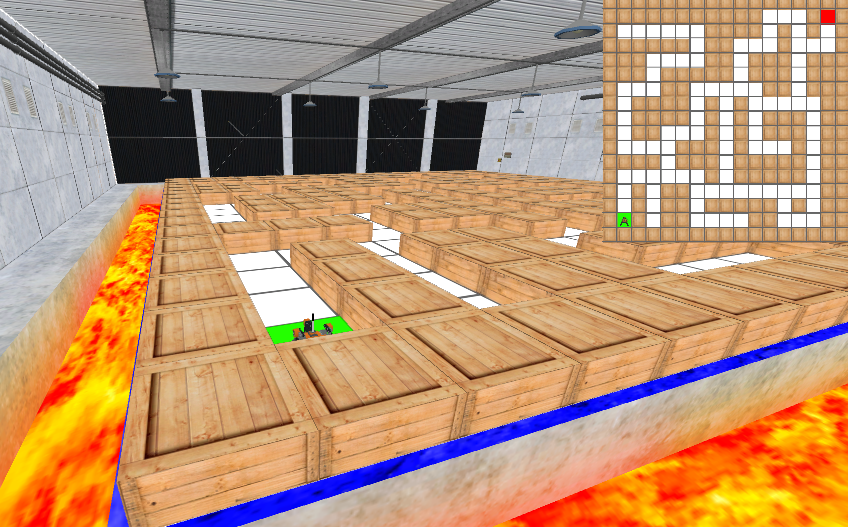
**墙壁迷宫+**游乐场网格内的每个方格间隔 300 毫米。
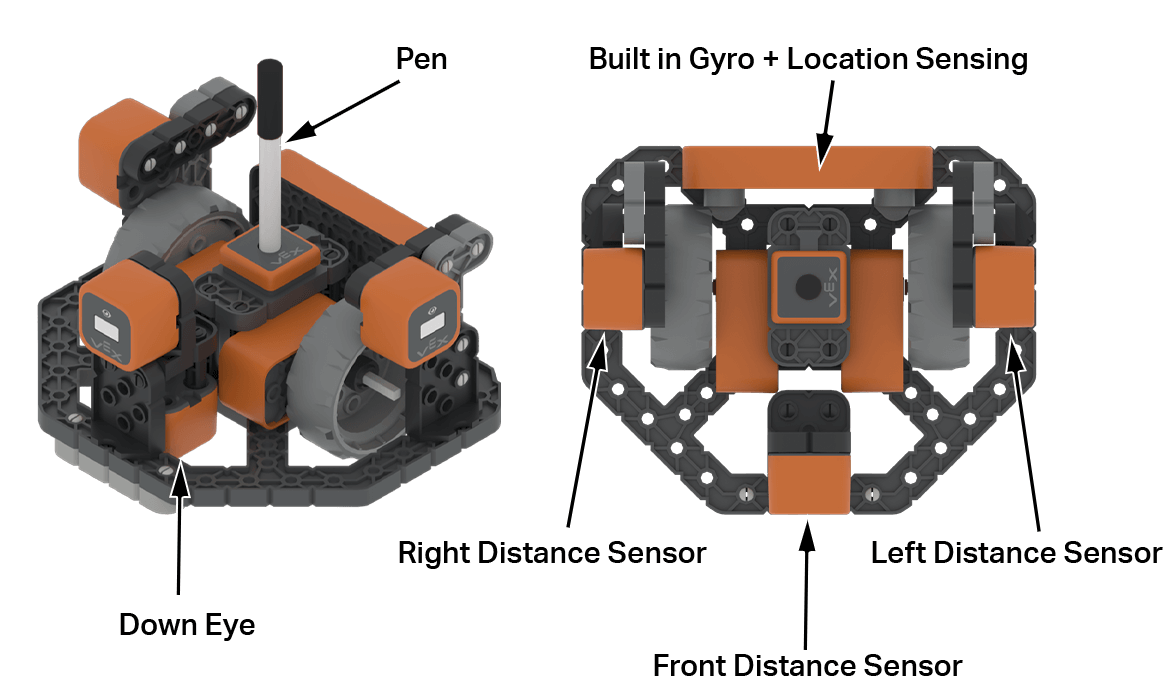
VR机器人属性#
Wall Maze+ 游乐场采用 VR MazeBot 配置。
VR MazeBot 长约 95 毫米,宽约 117.5 毫米。
与标准 VR 机器人相比,VR MazeBot 的默认速度提高了两倍。额外的速度可以帮助机器人更快地穿越迷宫。
配置 |
描述 |
API 文档 |
Python 命令名称 |
|---|---|---|---|
传动系统 |
Wall Maze+ 机器人可以使用带有内置陀螺仪传感器的标准 2x2 传动系统来跟踪 VR 机器人的航向和旋转角度。 |
|
|
VR笔 |
机器人可以使用标准 VR Pen 工具。 |
|
|
眼睛传感器 |
机器人只能访问下眼传感器。 |
|
|
距离传感器 |
机器人可以使用前、左、右距离传感器。 |
|
|
位置传感器 |
机器人可以使用位置传感器来报告其当前位置。 |
|