Detección#
Detección del brazo#
¿Puede el brazo de 6 ejes moverse a la posición?#
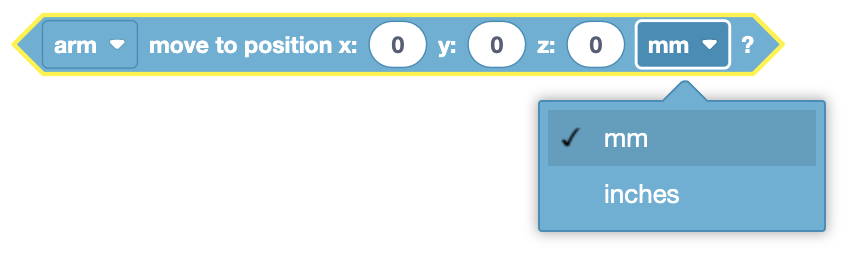
El bloque ¿Puede el brazo de 6 ejes moverse a la posición? se utiliza para informar si el brazo robótico de 6 ejes puede alcanzar la posición especificada.
<[brazo v] moverse a la posición x:(0) y:(0) z:(0) [mm v]?>
El bloque ¿Puede el brazo de 6 ejes moverse a la posición? informa “Verdadero” cuando el brazo de 6 ejes puede alcanzar esa posición.
El bloque ¿Puede el brazo de 6 ejes moverse a la posición? informa “Falso” cuando el brazo de 6 ejes no puede alcanzar esa posición.
Elija qué brazo de 6 ejes utilizar.
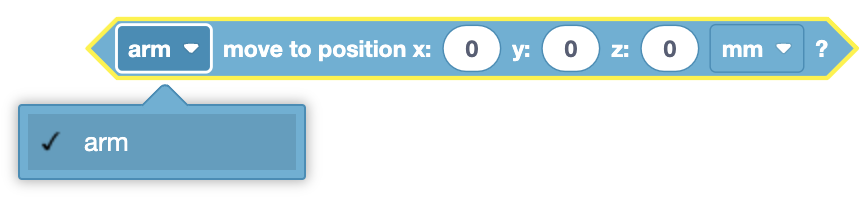
Seleccione qué unidad utilizar: milímetros (mm) o pulgadas.
En este ejemplo, el brazo de 6 ejes verificará si puede moverse a (0, 0, 0) e imprimirá que no puede alcanzar la posición.
cuando empezó
si <no <[brazo v] moverse a la posición x:(0) y:(0) z:(0) [mm v]?>> entonces
imprimir [The Arm can't move to this position.] en la consola ▶
¿Puede el brazo de 6 ejes incrementarse para moverse a la posición?#
El bloque ¿Puede el brazo de 6 ejes incrementar el movimiento a la posición? se utiliza para informar si el brazo robótico de 6 ejes puede moverse de manera incremental esa distancia.
<[brazo v] incremento de posición por x:(0) y:(0) z:(0) [mm v]?>
El bloque ¿Puede el brazo de 6 ejes moverse incrementalmente a la posición? informa “Verdadero” cuando el brazo de 6 ejes puede moverse incrementalmente esa distancia.
El bloque ¿Puede el brazo de 6 ejes moverse incrementalmente a la posición? informa “Falso” cuando el brazo de 6 ejes no puede moverse incrementalmente esa distancia.
Seleccione qué unidad utilizar: milímetros (mm) o pulgadas.
La imagen muestra un bloque hexagonal en un entorno de codificación visual diseñado para controlar el movimiento de un brazo a una posición específica en el espacio 3D. El bloque permite al usuario establecer las coordenadas x, y y z, actualmente establecidas en 0. La unidad de medida se puede seleccionar en un menú desplegable, con “mm” seleccionado y “/_static/img/sensing/arm_reach_inc_units.png” como opción adicional. Este bloque permite posicionar el brazo con precisión, ya sea en milímetros o pulgadas.
En este ejemplo, el brazo de 6 ejes verificará si puede incrementar el movimiento de 500 milímetros en el eje Y e imprimirá que no puede moverse esa distancia.
cuando empezó
si <no <[brazo v] incremento de posición por x:(0) y:(500) z:(0) [mm v]?>> entonces
imprimir [The Arm can't incremental move for this distance.] en la consola ▶
¿Puede el efector final del brazo de 6 ejes moverse a la orientación?#
El bloque ¿Puede el efector final del brazo de 6 ejes moverse a la orientación? se utiliza para informar si el efector final del brazo de 6 ejes puede girar sobre un eje hasta una orientación específica.
<[brazo v] mover el efector final a [paso v] (0) grados?>
El bloque ¿Puede el efector final del brazo de 6 ejes moverse a la orientación? informa “Verdadero” cuando el brazo de 6 ejes puede girar sobre un eje hasta una orientación específica.
El bloque ¿Puede el efector final del brazo de 6 ejes moverse a la orientación? informa “Falso” cuando el brazo de 6 ejes no puede girar sobre un eje hasta una orientación específica.
Seleccione el eje a utilizar:
paso - Movimiento alrededor del eje Y.
Rodar - Movimiento alrededor del eje X.
guiñada - Movimiento alrededor del eje Z.
La imagen muestra un bloque de codificación que incrementa la posición de un “brazo” mediante valores específicos en los ejes x, y, z. El bloque permite introducir valores para estas coordenadas y seleccionar la unidad de medida, que puede ser milímetros (mm) o pulgadas, como se muestra en el menú desplegable. El bloque tiene forma hexagonal, lo que indica que probablemente se utiliza dentro de una estructura condicional o de bucle, lo que permite ajustar la posición del brazo durante la ejecución/_static/img/sensing/arm_endeff_to_units.png
En este ejemplo, el brazo de 6 ejes verificará si el efector final puede apuntar hacia la posición de 40 grados en el eje X e imprimirá si puede o no.
cuando empezó
si <[brazo v] mover el efector final a [rollo v] (40) grados?> entonces
imprimir [The End Effector can move to this orientation.] en la consola ▶
demás
imprimir [The End Effector can move to this orientation.] en la consola ▶
¿Puede el efector final del brazo de 6 ejes moverse gradualmente hacia la orientación?#
El bloque ¿Puede el efector final del brazo de 6 ejes moverse de forma incremental a la orientación? se utiliza para informar si el efector final del brazo de 6 ejes puede girar de forma incremental sobre un eje de su orientación durante una cantidad específica de grados.
<[brazo v] incremento de orientación de [paso v] (0) grados?>
El bloque ¿Puede el efector final del brazo de 6 ejes moverse de forma incremental a la orientación? informa “Verdadero” cuando el brazo de 6 ejes puede girar de forma incremental sobre un eje durante una cantidad específica de grados.
El bloque ¿Puede el efector final del brazo de 6 ejes moverse de forma incremental a la orientación? informa “Falso” cuando el brazo de 6 ejes no puede girar de forma incremental sobre un eje durante una cantidad específica de grados.
Seleccione el eje a utilizar:
paso - Rotación alrededor del eje Y.
roll - Rotación alrededor del eje X.
guiñada - Rotación alrededor del eje Z.
La imagen muestra un bloque hexagonal que controla el movimiento del efector final de un brazo a un ángulo específico en grados. El bloque incluye un menú desplegable que permite al usuario elegir entre diferentes tipos de movimientos: cabeceo, balanceo y/_static/img/sensing/arm_endeff_inc_axis.png. El movimiento seleccionado es “cabeceo”, con un ángulo de 0 grados. Este bloque se usaría en un entorno de programación para controlar con precisión la orientación del efector final del brazo robótico en el espacio 3D.
En este ejemplo, el brazo de 6 ejes verificará si el efector final puede incrementar el movimiento 20 grados en el eje Z e imprimirá si puede o no.
cuando empezó
si <[brazo v] incremento de orientación de [guiñada v] (20) grados?> entonces
imprimir [The End Effector can increment move for this distance.] en la consola ▶
demás
imprimir [The End Effector can not increment move for this distance.] en la consola ▶
¿El brazo de 6 ejes está terminado?#
El bloque ¿El brazo de 6 ejes está listo? se utiliza para informar si el brazo de 6 ejes ha terminado de moverse.
<[brazo v] ya termino de moverme? :: custom-arm>
El bloque ¿El brazo de 6 ejes está listo? informa Verdadero cuando el brazo de 6 ejes no se mueve.
El bloque ¿El brazo de 6 ejes está listo? informa Falso cuando el brazo de 6 ejes se está moviendo.
En este ejemplo, el brazo se moverá a la posición (-100, 200, 100) e imprimirá su coordenada Y en mm cada 0,25 segundos a medida que se mueve, hasta que termine de moverse.
cuando empezó
[Move to (-100, 200, 100) and let subsequent blocks trigger.]
mover [Brazo1 v] a la posición x:(-100) y:(200) z:(100) [mm v] ◀ y no esperes
[Repeat the blocks until the Arm has finished moving.]
repetir hasta <[Brazo1 v] ya termino de moverme? :: custom-arm>
[Print the Arm's current Y position in mm on the Brain every .25 seconds.]
imprimir ([Brazo1 v] posición [y v] en [mm v] :: custom-arm) en la consola ◀ y coloque el cursor en la siguiente fila
esperar (0.25) segundos
Posición del brazo de 6 ejes#
El bloque Posición del brazo de 6 ejes se utiliza para informar la posición actual del brazo de 6 ejes en el eje especificado.
([brazo v] posición [incógnita v] en [mm v] :: custom-arm)
Seleccione qué eje desea informar.
La imagen muestra un bloque que se utiliza para recuperar la posición de un brazo robótico. Este bloque permite al usuario elegir entre las coordenadas “x”, “y” y “z” para especificar la posición del eje/_static/img/sensing/arm_position_axis.pngse consulta. La coordenada seleccionada devolverá la posición en milímetros, según las opciones desplegables. Este bloque se usaría en un programa para determinar la posición actual del brazo a lo largo del eje seleccionado.
Seleccione qué unidad desea reportar: milímetros (mm) o pulgadas.
La imagen muestra un bloque que permite obtener la posición de un brazo robótico a lo largo de un eje específico. Este bloque permite seleccionar el eje (“x”, “y” o “z”) que se desea medir. También incluye un menú desplegable para elegir la unidad de medida, ya sea milímetros (“mm”) o pulgadas. Este bloque se usaría en un programa para determinar y devolver la posición actual del brazo a lo largo del eje seleccionado en la unidad/_static/img/sensing/arm_position_units.pngmedida elegida.
En este ejemplo, el brazo de 6 ejes imprimirá su posición actual del eje Z en milímetros en la consola de impresión.
cuando empezó
imprimir ([brazo v] posición [z v] en [mm v] :: custom-arm) en la consola ▶
Orientación del efector final del brazo de 6 ejes#
El bloque Orientación del efector final del brazo de 6 ejes se utiliza para informar la orientación actual del efector final del brazo de 6 ejes.
([brazo v] orientación [paso v] en grados :: custom-arm)
Seleccione qué eje desea informar:
paso - Rotación alrededor del eje Y.
roll - Rotación alrededor del eje X.
guiñada - Rotación alrededor del eje Z.
La imagen muestra un bloque diseñado para medir y generar la orientación de un brazo robótico. El bloque está configurado para determinar la orientación a lo largo del eje de cabeceo, con opciones para seleccionar entre cabeceo, balanceo y guiñada. La orientación seleccionada, en este caso el cabeceo, se medirá en grados y el resultado se mostrará en las unidades/_static/img/sensing/arm_orientation_axis.png. El menú desplegable permite a los usuarios elegir entre cabeceo, balanceo y guiñada para determinar el eje de orientación específico que desean medir.
En este ejemplo, el brazo de 6 ejes imprimirá la orientación actual del eje Y del efector final en grados en la consola de impresión.
cuando empezó
imprimir ([brazo v] orientación [paso v] en grados :: custom-arm) en la consola ▶