V5 Apuestas altas (Axel)#
Axel es el robot héroe VEX V5 utilizado en el V5RC 24-25 High Stakes Playground.
Descripción general del robot#
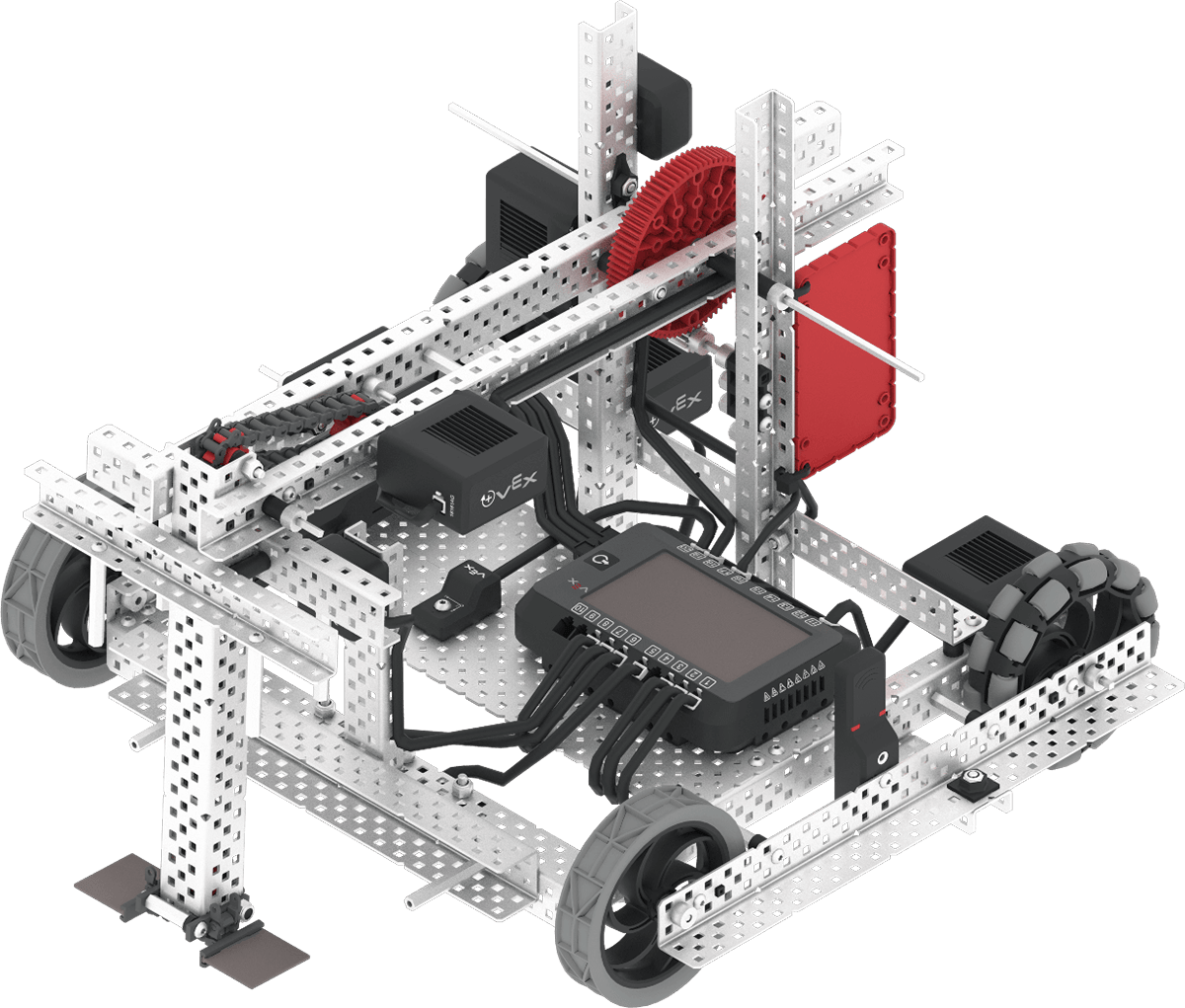
Axel admite controles y sensores de realidad virtual estándar, como el sensor inercial y el temporizador cerebral, con características adicionales específicas de Axel que se tratan en Bloques específicos del robot y Python específico del robot.
Motores#
Configuración y nombre del comando Python |
Descripción |
|---|---|
|
El brazo sube y baja el brazo de Axel. El brazo debe elevarse para que no bloquee el sensor de visión de IA y para empujar los anillos hacia las estacas. |
|
El motor de empuje mueve el empujador hacia abajo del brazo. Esto permite empujar los anillos fuera del brazo y colocarlos en una estaca. La posición del empujador en la parte superior del brazo es de 0 grados. |
Componentes y características#
Componente o característica |
Usar |
Documentación de la API |
|---|---|---|
Tren de transmisión |
Mueve y gira el robot. |
|
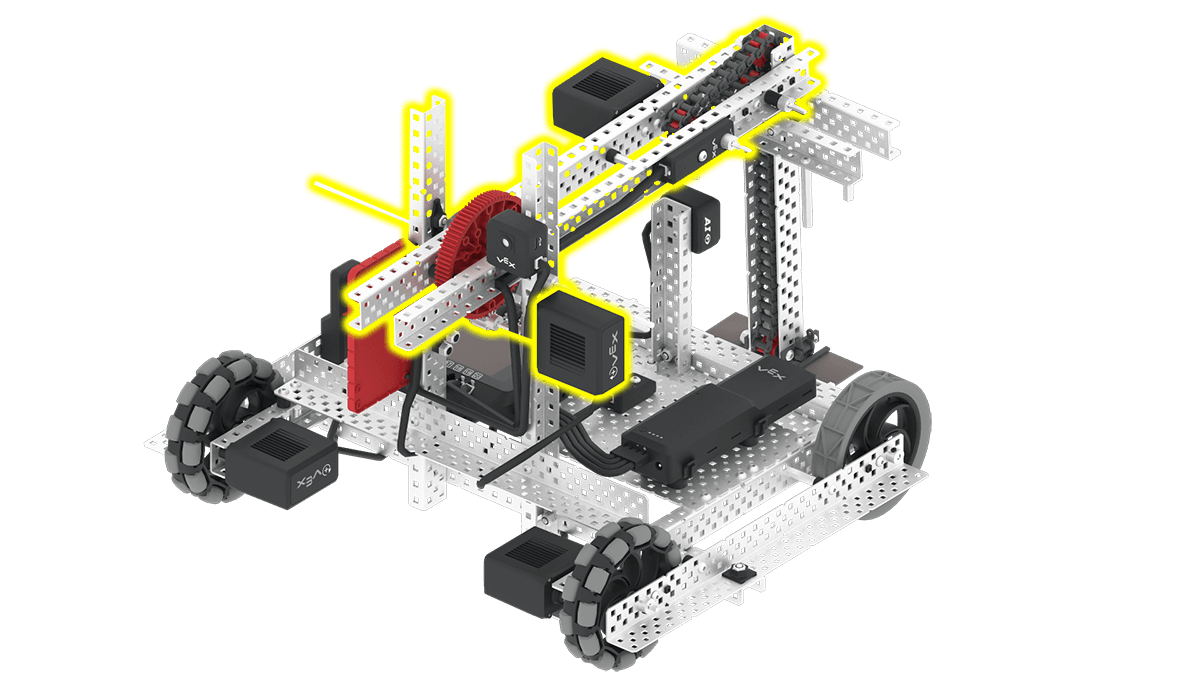
Motor del brazo |
Levanta y baja el brazo para manipular objetos del juego. El brazo debe elevarse de forma que no bloquee el sensor de visión de IA y para empujar los anillos hacia las estacas. Para elevar el brazo lo suficiente como para empujar un anillo hacia una estaca, debe elevarse al menos 310 grados. |
|
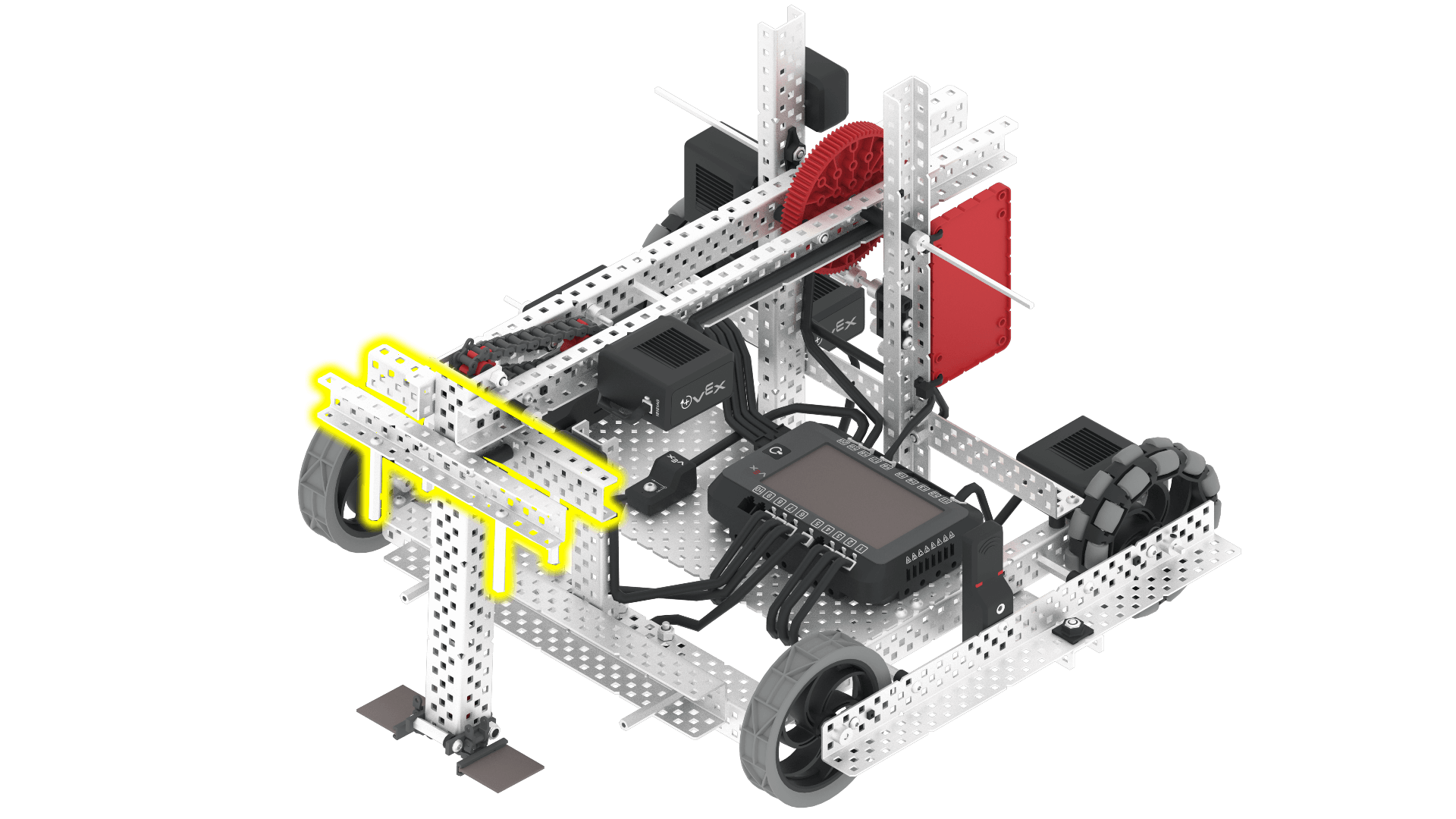
Motor de empuje |
Desplaza el empujador hacia abajo a lo largo del brazo. Esto permite que los anillos se desprendan del brazo y se fijen a una estaca. La posición del empujador en la parte superior del brazo es de 0 grados. Para que un anillo se desprenda del brazo, el motor del empujador debe descender 780 grados. |
|
Sensor de visión con IA |
Detecta los objetos del juego para que el robot pueda orientarse de forma autónoma. |
|
Sensor de distancia |
Indica la distancia a la que se encuentra un objeto de la parte frontal del robot. |
|
Sensor óptico |
Detecta objetos que se encuentran delante del robot y determina su color. |
|
Sensor de rotación |
Devuelve el ángulo de rotación y la posición actuales del motor de empuje. |
|
Sensor GPS |
Devuelve la posición y la dirección actuales del robot en el área de juego. |
|
Temporizador cerebral |
Registra el tiempo transcurrido desde que comenzó el proyecto. |
parques infantiles#
Patio de juegos |
Descripción |
|---|---|
Marcadores y porterías móviles en el campo de habilidades virtuales V5RC 24-25. |