Coordenadas GPS#
El sensor GPS (Sistema de Posicionamiento de Juego™) de VEXcode VR proporciona coordenadas (X, Y) para la navegación en el campo de juego Push Back V5RC 25-26. Utiliza el código de campo GPS, un patrón de tablero de ajedrez en el interior del campo, para determinar la posición y el rumbo. El sensor funciona como un sistema de posición absoluta, eliminando la deriva y la necesidad de calibración individual.
¿Cómo funciona el sensor GPS?#
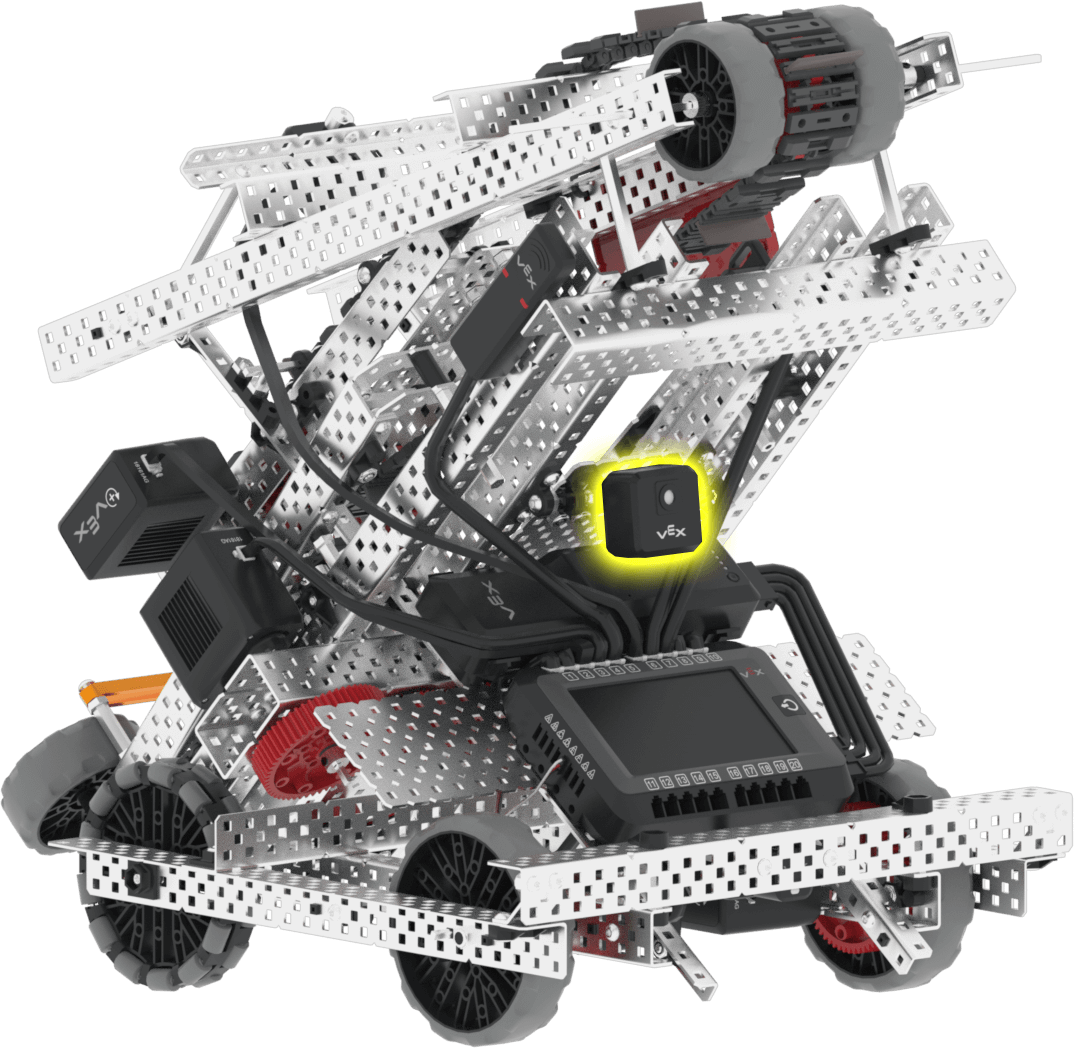
Para la navegación, el sensor GPS utiliza el sistema de coordenadas cartesianas, con el centro del campo designado como (0, 0). El sensor es una cámara en blanco y negro montada en la parte trasera del robot, orientada hacia atrás para leer el código de campo con eficacia.
El sensor GPS informa las coordenadas (X, Y) del centro de rotación de Dex en milímetros o pulgadas. Esto permite un seguimiento preciso de la posición del robot dentro del entorno de realidad virtual de VEXcode, lo que facilita una navegación y un posicionamiento precisos durante el juego o las tareas de programación.
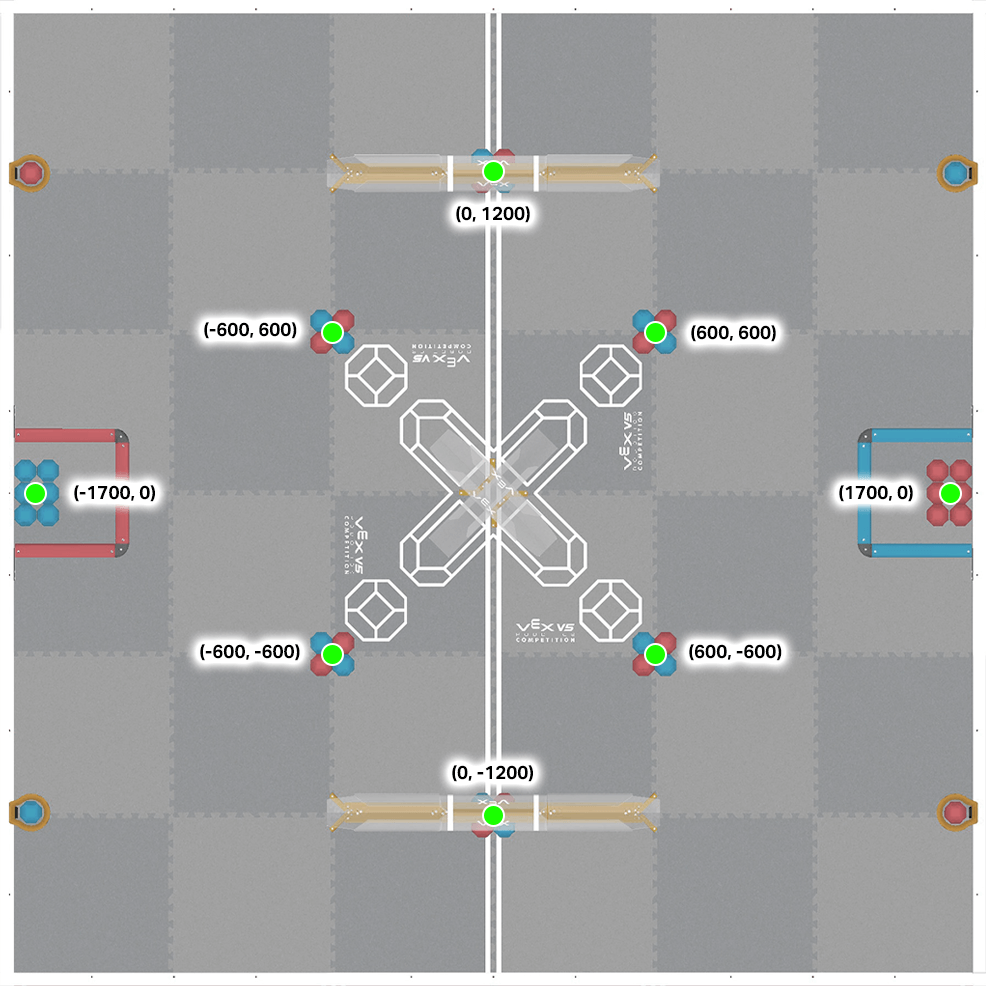
Identificación de coordenadas (X, Y) en el campo#
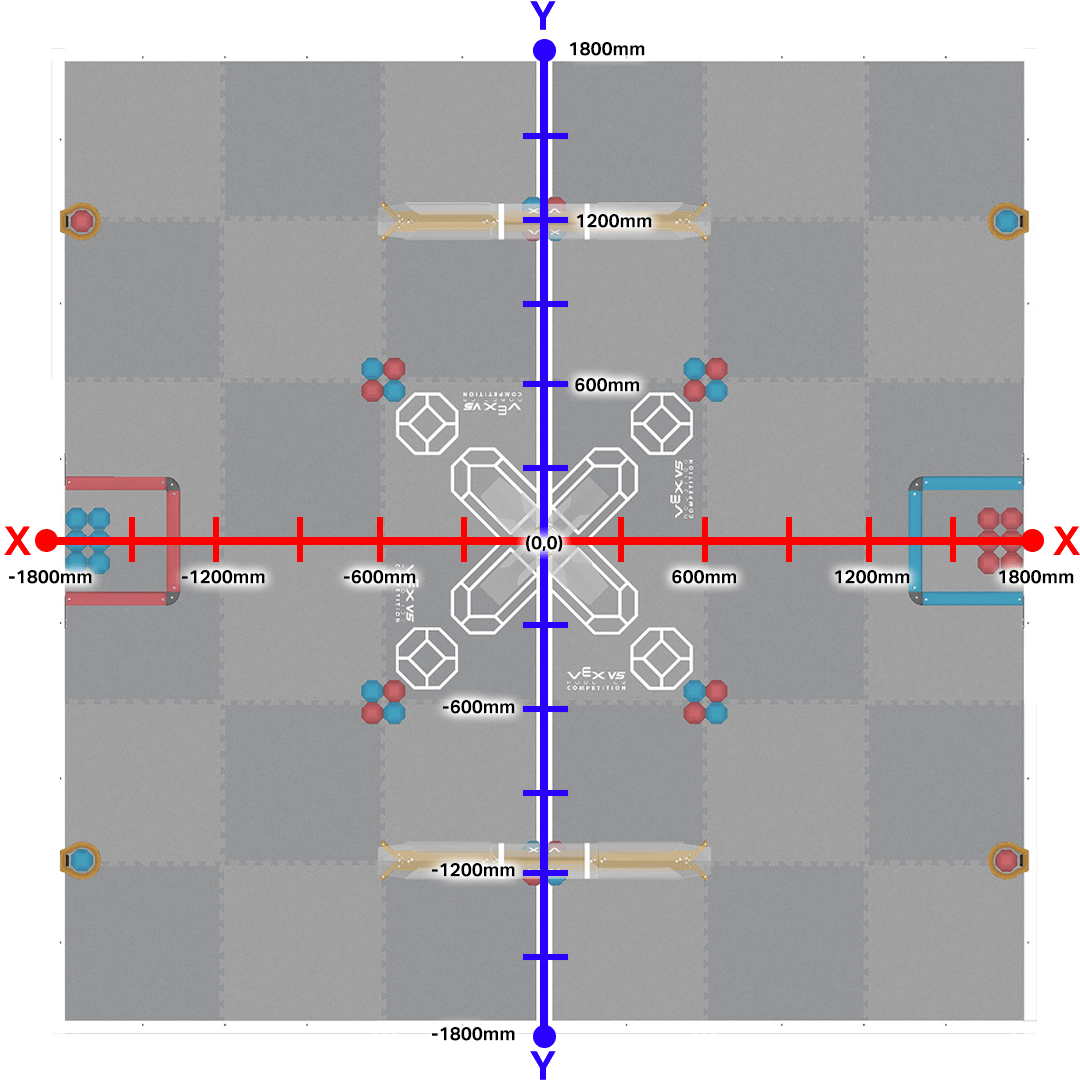
The V5RC Push Back Field in VEXcode VR ranges from approximately -1800mm to 1800mm for the X and Y positions. The starting location of Dex depends on the starting position selected.
La ubicación central, o el origen (0,0), se encuentra en el centro del campo.
Coordenadas (X, Y) de los elementos del juego#
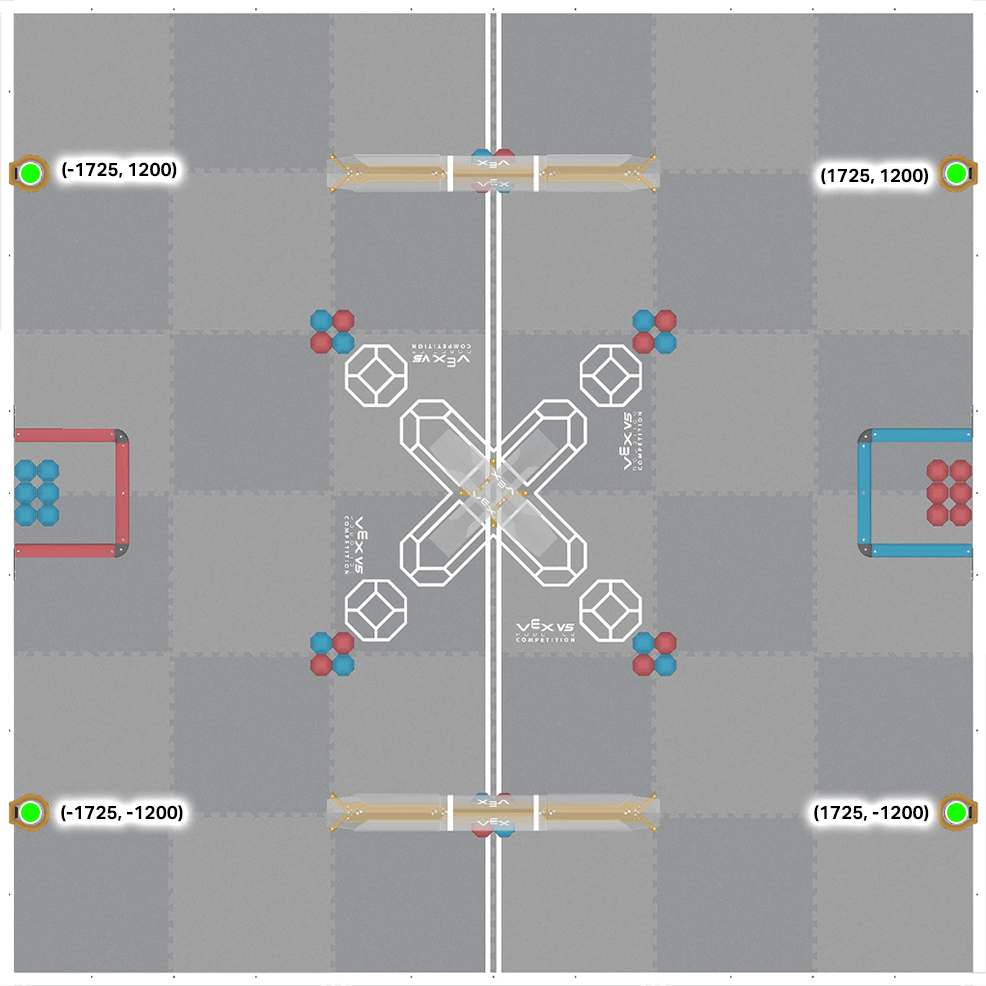
Goals#
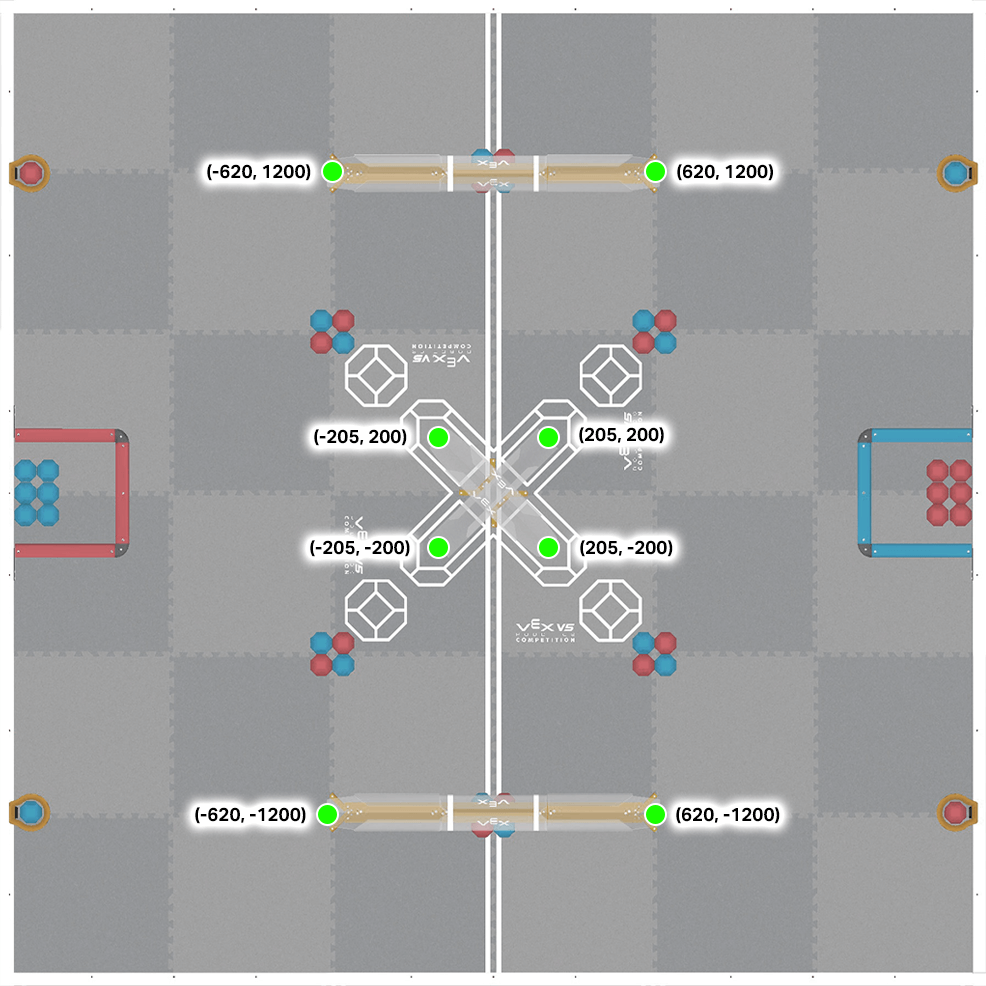
Blocks#
Loaders#