Python específico para robots#
Introducción#
El patio de juegos V5RC 25-26 Push Back presenta métodos exclusivos de la construcción diseñada para este patio de juegos, incluidas dos opciones de motor, sensor de visión de inteligencia artificial, sensor óptico y sensor del sistema de posicionamiento de juego (GPS).
Todos los métodos VR estándar de VEXcode están disponibles para su uso en el patio de juegos V5RC 25-26 Push Back.
A continuación se muestra una lista de todos los métodos específicos de Playground disponibles:
Movimiento: mueve y rastrea los motores del robot.
Comportamiento
spin– Spins the selected motor or motor group indefinitely.spin_for– Spins a motor or group for a specific distance in degrees or turns.spin_to_position– Spins a motor or motor group to a set position.stop– Stops a specific motor or motor group from spinning.
Mutadores
set_position– Sets the encoder value of a motor or motor group.set_velocity– Sets the speed of a motor or motor group as a percentage.set_timeout– Limits how long a motor block waits before giving up if movement is blocked.
Conseguidores
is_done– Returns a Boolean indicating whether the motor is no longer spinning.is_spinning– Returns a Boolean indicating whether the motor is currently spinning.position– Returns the motor’s current rotational position in degrees or turns.velocity– Returns the motor’s current velocity in % or rpm.
AI Vision: captura y analiza objetos utilizando el sensor de visión AI.
Conseguidores
take_snapshot– Returns a tuple of detected objects based on a given signature.
Propiedades
width– Width of the detected object in pixels.height– Height of the detected object in pixels.centerX– X position of the object’s center in pixels.centerY– Y position of the object’s center in pixels.originX– X position of the object’s top-left corner in pixels.originY– Y position of the object’s top-left corner in pixels.id– Classification or tag ID of the object.
Detección: utilice los distintos sensores del robot.
Óptico
is_near_object– Returns whether a detected object is near the Optical Sensor.color– Returns the color detected from the Optical Sensor.brightness– Returns the brightness percentage detected by the sensor.hue– Returns the hue value of the detected color.object_detected– Registers a callback function for when the Optical Sensor detects an object.object_lost– Registers a callback function for when the Optical Sensor loses an object.
GPS
x_position– Returns the current x coordinate of a GPS Sensor on the Field.y_position–Returns the current y coordinate of a GPS Sensor on the Field.heading– Returns the heading that the robot is currently facing based on the GPS Sensor’s readings from 0 to 359 degrees.
Movimiento#
Actions#
girar#
spin spins a motor or motor group in the specified direction indefinitely.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
The direction for the motor to spin:
|
def main():
# Pick up a second Block
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 350, MM)
girar_para#
spin_for spins a motor or motor group for a given amount of degrees or turns.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
The direction for the motor to spin:
|
|
La distancia que debe girar el motor, expresada en un número entero. |
|
The unit that represents the distance to rotate:
|
|
Optional.
|
def main():
# Pick up a second Block
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 350, MM)
girar a la posición#
spin_to spins a motor or motor group to a given position.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
El ángulo específico o número de vueltas que dará el motor. |
|
The unit that represents the angle to rotate to:
|
|
Optional.
|
def main():
# Pick up a second Block
conveyor_motor.spin_to_position(150, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 350, MM)
detener#
stop stops a motor or motor group from spinning.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Pick up a second Block
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 350, MM)
intake_motor.stop()
Mutators#
posición_establecida#
set_position sets a motor’s or motor group’s encoder position to the given position value.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
El entero específico que se debe configurar para el codificador del motor. |
|
The unit that represents the angle to rotate to:
|
def main():
# Pick up a second Block
conveyor_motor.set_position(-150, DEGREES)
conveyor_motor.spin_to_position(0, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 350, MM)
establecer_velocidad#
set_velocity sets the speed of a motor or motor group.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
La velocidad a la que girará el motor V5, que varía de 0 a 100. |
|
The unit that represents the new velocity:
|
def main():
# Pick up a second Block
conveyor_motor.set_velocity(90, PERCENT)
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 400, MM)
establecer_tiempo_de_espera#
set_timeout sets a time limit for a motor’s or motor group’s movement commands. This prevents Motion commands that do not reach their intended position from preventing subsequent commands from running.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
La cantidad de tiempo que el motor esperará antes de detenerse. |
|
The unit to represent the timeout:
|
def main():
# Pick up a second Block
conveyor_motor.set_timeout(0.5, SECONDS)
conveyor_motor.spin_to_position(1000, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 400, MM)
Getters#
está_hecho#
is_done returns a Boolean indicating whether the specified motor or motor group is not spinning.
True– The specified motor is not spinning.False– The specified motor is spinning.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Pick up a second Block
conveyor_motor.spin_to_position(300, DEGREES, wait=False)
wait(0.1, SECONDS)
while not conveyor_motor.is_done():
drivetrain.drive(FORWARD)
intake_motor.spin(FORWARD)
wait(5, MSEC)
drivetrain.stop()
intake_motor.stop()
está girando#
is_spinning returns a Boolean indicating whether the specified motor or motor group is spinning.
True– The specified motor is spinning.False– The specified motor is not spinning.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Pick up a second Block
conveyor_motor.spin_to_position(300, DEGREES, wait=False)
wait(0.1, SECONDS)
while conveyor_motor.is_spinning():
drivetrain.drive_for(FORWARD, 200, MM)
intake_motor.spin(FORWARD)
posición#
position returns the total distance the specified motor or motor group has rotated.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
The units that represent the motor’s position:
|
def main():
# Pick up a second Block
while conveyor_motor.position(DEGREES) < 150:
conveyor_motor.spin(FORWARD)
wait(2, MSEC)
conveyor_motor.stop()
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 400, MM)
velocidad#
velocity returns the current rotational speed of the motor or motor group.
Uso:
Se puede utilizar uno de los dos objetos de motor disponibles con este método, como se muestra a continuación:
motor |
Dominio |
|---|---|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
The unit that represent the motor’s position:
|
def main():
# Pick up a second block
conveyor_motor.set_velocity(100, PERCENT)
conveyor_motor.spin_to_position(300, DEGREES, wait=False)
wait(0.2, SECONDS)
brain.screen.print(conveyor_motor.velocity(PERCENT))
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 400, MM)
Visión de IA#
Getters#
tomar_instantánea#
take_snapshot filters the data from the AI Vision Sensor frame to return a tuple.
La tupla almacena objetos ordenados de mayor a menor por ancho, comenzando en el índice 0. Se puede acceder a las propiedades de cada objeto mediante su índice. Si no se detectan objetos coincidentes, se devuelve una tupla vacía.
Usage:
ai_vision.take_snapshot(signature)
Parámetros |
Descripción |
|---|---|
|
¿De qué firma se obtienen los datos? La única firma disponible es:
|
def main():
# If an object is detected, pick it up
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
while not bumper.pressing():
wait(2, MSEC)
drivetrain.stop()
break
Properties#
There are seven properties that are included with each object stored in a tuple after take_snapshot is used.
Some property values are based off of the detected object’s position in the AI Vision Sensor’s view at the time that take_snapshot was used. The AI Vision Sensor has a resolution of 320 by 240 pixels.
.ancho#
.width returns the width of the detected object in pixels, which is an integer between 1 and 320.
def main():
# If an object is detected, approach and pick it up
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
if ai_objects[0].width > 65:
drivetrain.stop()
break
else:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
.altura#
.height returns the height of the detected object in pixels, which is an integer between 1 and 240.
def main():
# If an object is detected, approach and pick it up
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
if ai_objects[0].height > 55:
drivetrain.stop()
break
else:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
.centroX#
.centerX returns the x-coordinate of the detected object’s center in pixels, which is an integer between 0 and 320.
def main():
# Pick up a Block from the top left group
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
drivetrain.turn_for(LEFT, 80, DEGREES)
drivetrain.drive_for(FORWARD, 200, MM)
drivetrain.set_turn_velocity(20, PERCENT)
drivetrain.turn(LEFT)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
if 140 < ai_objects[0].centerX < 180:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
while not bumper.pressing():
wait(2, MSEC)
drivetrain.stop()
.centerY#
.centerY returns the y-coordinate of the detected object’s center in pixels, which is an integer between 0 and 240.
def main():
# If an object is detected, approach and pick it up
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
if ai_objects[0].centerY > 140:
drivetrain.stop()
break
else:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
.origenX#
.originX returns the x-coordinate of the top-left corner of the detected object’s bounding box in pixels, which is an integer between 0 and 320.
def main():
# Pick up a Block from the top left group
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
drivetrain.turn_for(LEFT, 80, DEGREES)
drivetrain.drive_for(FORWARD, 300, MM)
drivetrain.set_turn_velocity(20, PERCENT)
drivetrain.turn(RIGHT)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
if 100 < ai_objects[0].originX < 140:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
while not bumper.pressing():
wait(2, MSEC)
drivetrain.stop()
.origenY#
.originY returns the y-coordinate of the top-left corner of the detected object’s bounding box in pixels, which is an integer between 0 and 240.
def main():
# If an object is detected, approach and pick it up
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
if ai_objects[0].originY > 120:
drivetrain.stop()
break
else:
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
.identificación#
.id returns the ID of the detected AI Classification as an integer.
Clasificación de IA |
identificación |
Firma |
|---|---|---|
Bloque azul |
1 |
|
Bloque rojo |
2 |
|
def main():
# Pick up a Red Block from the top left group
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
drivetrain.turn_for(LEFT, 80, DEGREES)
drivetrain.drive_for(FORWARD, 300, MM)
while True:
ai_objects = ai_vision.take_snapshot(AiVision.ALL_AIOBJS)
if ai_objects:
drivetrain.drive(FORWARD)
if (ai_objects[0].id) == 2:
intake_motor.spin(FORWARD)
while not bumper.pressing():
wait(2, MSEC)
drivetrain.stop()
break
Detección#
Optical#
está_cerca_del_objeto#
is_near_object returns a Boolean indicating whether or not the Optical Sensor detects an object close to the sensor.
True– The object is close to the Optical Sensor.False– The object is not close to the Optical Sensor.
Usage:
optical.is_near_object()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Move the preloaded Block to the top of the Conveyor
conveyor_motor.spin(FORWARD)
while not optical.is_near_object():
wait(2, MSEC)
conveyor_motor.stop()
color#
color returns the color detected by the Optical Sensor:
Color devuelto: |
|---|
|
Usage:
optical.color()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Pick up and move a Blue Block to the top of the Conveyor
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 360, MM)
conveyor_motor.spin(FORWARD)
while not optical.color() == BLUE:
wait(2, MSEC)
conveyor_motor.stop()
brillo#
brightness returns the brightness value detected by the Optical Sensor as a percent from 0% to 100%.
Usage:
optical.brightness()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Move the preloaded Block to the top of the Conveyor
conveyor_motor.spin(FORWARD)
while not 0 < optical.brightness():
wait(2, MSEC)
conveyor_motor.stop()
matiz#
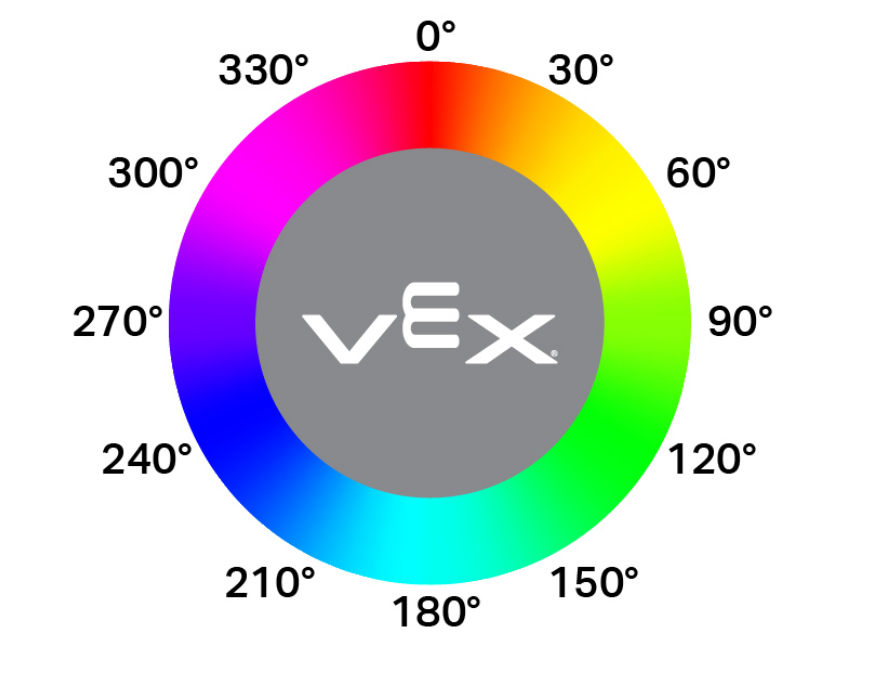
hue returns the hue detected by the Optical Sensor.
Los valores de tono varían de 0 a 359 grados, correspondientes a las posiciones en la rueda de color que se muestran a continuación.
Usage:
optical.hue()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Pick up and move a Blue Block to the top of the Conveyor
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive_for(FORWARD, 360, MM)
conveyor_motor.spin(FORWARD)
while not 220 < optical.hue() < 260:
wait(2, MSEC)
conveyor_motor.stop()
objeto_detectado#
object_detected registers a callback function for when the Optical Sensor detects an object.
Usage:
optical.object_detected(callback, arg)
Parámetros |
Descripción |
|---|---|
|
Una función que se llamará cuando se detecte un objeto. |
|
Opcional. Una tupla que se utiliza para pasar argumentos a la función de devolución de llamada. |
def ready_block():
# Stop the conveyor when Block is at the Sensor
conveyor_motor.stop()
def main():
# Move the preloaded Block near the top of the Conveyor
conveyor_motor.spin(FORWARD)
optical.object_detected(ready_block)
objeto_perdido#
object_lost registers a callback function for when the Optical Sensor loses a previously detected object.
Usage:
optical.object_lost(callback, arg)
Parámetros |
Descripción |
|---|---|
|
Una función que se llamará cuando se pierda un objeto detectado. |
|
Opcional. Una tupla que se utiliza para pasar argumentos a la función de devolución de llamada. |
def ready_block():
# Stop the conveyor when Block is at the top
conveyor_motor.stop()
def main():
# Move the preloaded Block to the top of the Conveyor
conveyor_motor.spin(FORWARD)
optical.object_lost(ready_block)
GPS#
Todos los ejemplos de sensores GPS (Game Positioning System™) en esta página utilizan la posición de inicio del patio de juegos predeterminada, C.
posición x#
x_position returns the current x coordinate of a GPS (Game Positioning System™) Sensor on the Field.
Usage:
gps.x_position(units)
Parámetros |
Descripción |
|---|---|
unidades |
The unit of the offset value, |
def main():
# Pick up a second Block
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
while not gps.x_position(MM) > -795:
wait(2, MSEC)
drivetrain.stop()
posición y#
y_position returns the current y coordinate of a GPS (Game Positioning System™) Sensor on the Field.
Usage:
gps.y_position(units)
Parámetros |
Descripción |
|---|---|
unidades |
The unit of the offset value, |
def main():
# Pick up a second Block
conveyor_motor.spin_for(FORWARD, 200, DEGREES)
intake_motor.spin(FORWARD)
drivetrain.drive(FORWARD)
while not -450 > gps.y_position(MM):
wait(2, MSEC)
drivetrain.stop()
título#
heading returns the heading that the robot is currently facing based on the GPS (Game Positioning System™) Sensor’s readings from 0 to 359 degrees.
Usage:
gps.heading()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
def main():
# Score the preloaded Block into a Center Goal
drivetrain.set_turn_velocity(30, PERCENT)
drivetrain.turn(LEFT)
while not 40 > gps.heading():
wait(2, MSEC)
drivetrain.drive_for(FORWARD, 1000, MM)
drivetrain.turn(RIGHT)
while not gps.heading() > 310:
wait(2, MSEC)
drivetrain.drive_for(REVERSE, 400, MM)
conveyor_motor.spin(FORWARD)