变量#
要将变量放入监视器控制台,请将其报告块拖放到屏幕右侧的监视器图标上。
数值变量#
数值变量 块用于报告赋给变量的数值。变量默认创建时具有全局作用域。
(myVariable)
使用设置数字变量块来设置或更新变量的数值。
数字变量报告块用于具有圆形空间的块中。
使用创建变量按钮创建变量。
在此示例中,变量 driveLength 设置为 500,并用于 Drive for 块。这将使 Drive for 块向前移动 500 毫米。
当开始
设定 [driveLength v] 为 (500)
驱动 [向前 v] (driveLength) [毫米 v] ▶
设置数值变量#
设置数值变量 块用于将数值变量设置为给定值。变量默认创建时具有全局作用域。
设定 [myVariable v] 为 (0)
选择要使用的数值变量。数值变量也可以重命名或删除。
设置数字变量块可以接受小数、整数或数字块。
在此示例中,变量 driveLength 设置为 500,并用于 Drive for 块。这将使 Drive for 块向前移动 500 毫米。
当开始
设定 [driveLength v] 为 (500)
驱动 [向前 v] (driveLength) [毫米 v] ▶
更改数值变量#
改变数字变量块用于通过给定值改变变量。
将 [myVariable v] 改变 (1)
选择要使用的数字变量 - 所选变量也可以重命名或删除。
更改数字变量块可以接受小数、整数或数字块。
在此示例中,变量 driveLength 被更改为 500,并用于 Drive for 块中。这会使 Drive for 块向前移动 500 毫米。
当开始
将 [driveLength v] 改变 (500)
驱动 [向前 v] (driveLength) [毫米 v] ▶
布尔变量#
布尔变量 块用于报告布尔变量的值。默认情况下,变量具有全局作用域。
<myBoolean>
使用设置布尔变量块来设置或更新布尔变量的值。
布尔变量块报告真值或假值,用于具有六边形(六面)空间的块中。
布尔变量是使用创建布尔按钮创建的。
在此示例中,项目开始时将布尔变量 driveNow 设置为 True。这使得传动系统向前行驶,直到 driveNow 变量返回 False。
当开始
设定 [driveNow v] 为 <true v>
如果 <driveNow> 那么
驱动 [向前 v]
结束
驱动停止
设置布尔变量#
设置布尔变量 块用于将布尔变量设置为给定值。变量默认创建时具有全局作用域。
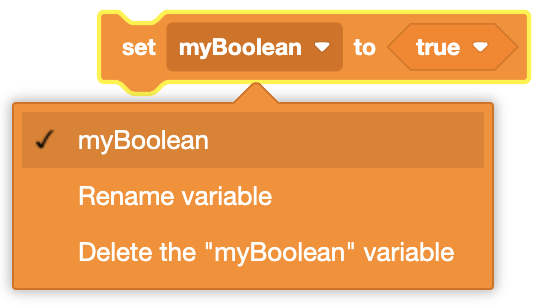
设定 [myBoolean v] 为 <true v>
选择要使用的布尔变量。布尔变量也可以重命名或删除。
选择一个布尔值。
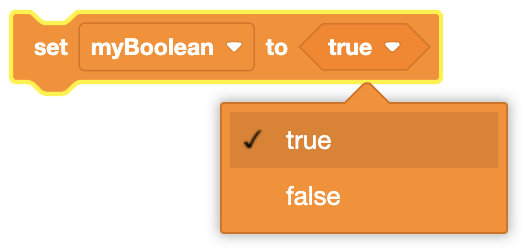
设置布尔变量块可以接受六边形(六边形)块。
在此示例中,项目开始时将布尔变量 driveNow 设置为 True。这使得传动系统向前行驶,直到 driveNow 变量返回 False。
当开始
设定 [driveNow v] 为 <true v>
如果 <driveNow> 那么
驱动 [向前 v]
结束
驱动停止
列表项#
列表项块用于报告列表中某个项目的值。
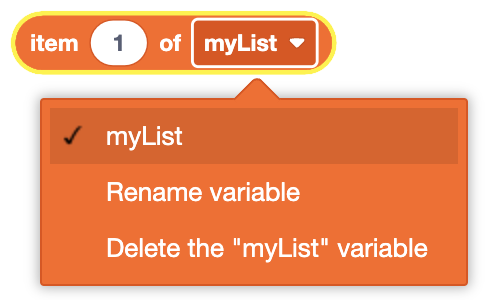
([myList v] 元素 (1))
选择要使用的列表。该列表也可以重命名或删除。
输入项目在列表中的位置编号。此处报告的是列表中的第二个项目(项目 2)。
列表项块可以接受小数、整数或数字块。
在此示例中,“cardinalHeadings”列表存储了北、东、南、西的度数。传动系统转向面项目 3,该面设置为“180”度。
当开始
设定 [cardinalHeadings v] 为 (0) (90) (180) (270)
归位至 ([cardinalHeadings v] 元素 (3)) 度 ▶
替换列表项#
替换列表项块用于将列表中的项目更新为新值。
将 [myList v] 元素 (1) 置换为 (1)
选择要使用的列表。该列表也可以重命名或删除。
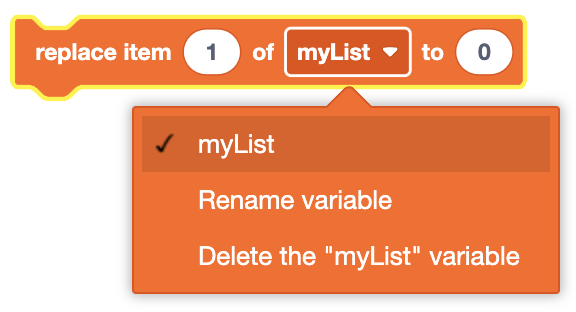
替换列表项块可以接受小数、整数或数字块。
在此示例中,仅 cardinalHeadings 列表中的第 2 项被替换为 90。传动系统随后将转向 90 度。
当开始
将 [cardinalHeadings v] 元素 (2) 置换为 (2)
归位至 ([cardinalHeadings v] 元素 (2)) 度 ▶
设置列表项#
设置列表项 块用于将列表中的每个项设置为输入的值。变量默认创建为全局变量。
设定 [myList v] 为 (0) (0) (0) (0) (0)
选择要使用的二维列表。二维列表也可以重命名或删除。
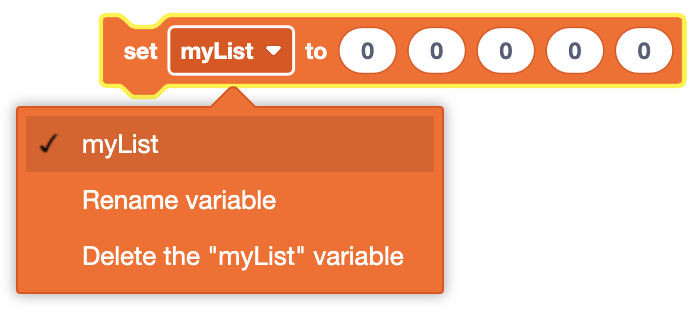
设置列表项块可以接受小数、整数或数字块。
在此示例中,“cardinalHeadings”列表存储了北、东、南、西的度数。传动系统转向面项目 3,该面设置为“180”度。
当开始
设定 [cardinalHeadings v] 为 (0) (90) (180) (270)
归位至 ([cardinalHeadings v] 元素 (3)) 度 ▶
列表长度#
列表长度块用于报告列表中的项目数量。
([myList v] 长度 :: list)
选择要使用的列表。二维列表也可以重命名或删除。
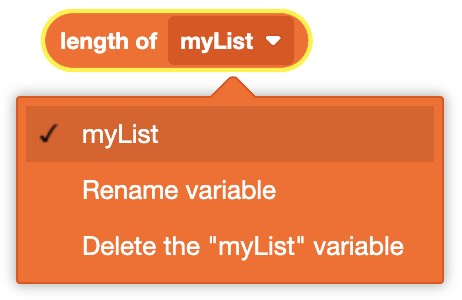
列表长度报告块适合接受圆形空间的块。
在这个例子中,cardinalHeadings 列表的长度将被打印到控制台。
当开始
打印 ([cardinalHeadings v] 长度 :: list) ▶
2D 列表项#
2D 列表项块用于报告 2D 列表中某个项目的值。
([my2Dlist v] 元素 (1)(1))
选择要使用的二维列表。二维列表也可以重命名或删除。
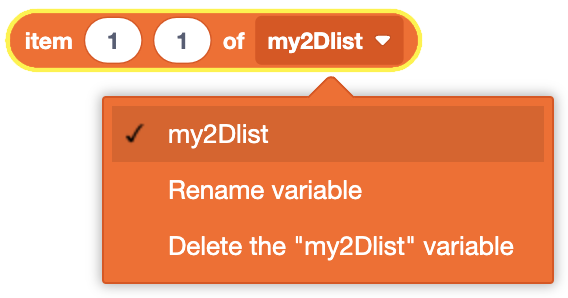
输入要报告的项目在列表中的行(第一个数字)和列(第二个数字)位置。此处报告的是二维列表中位于第 2 行、第 3 列的项目。
([my2Dlist v] 元素 (2)(3))
2D 列表项块可以接受小数、整数或数字块。
在此示例中,moveCoordinates 二维列表用于存储与操场上位置相关的数值。假设机器人从坐标 (0, 0) 开始,传动系统将使用二维列表中 (5,1) 和 (5,2) 项移动到坐标 (300, 200)。
当开始
设定 [move_coordinates v] 为 ((300) (150)) ((500) (200))
驱动 [向前 v] ([move_coordinates v] 元素 (1)(1)) [毫米 v] ▶
[右 v] 转 (90) 度 ▶
驱动 [向前 v] ([move_coordinates v] 元素 (1)(2)) [毫米 v] ▶
替换二维列表项#
替换二维列表项块用于将二维列表中的项目更新为新值。
将 (0) 元素 (1)(1) 置换为 [my2Dlist v]
选择要使用的二维列表。二维列表也可以重命名或删除。
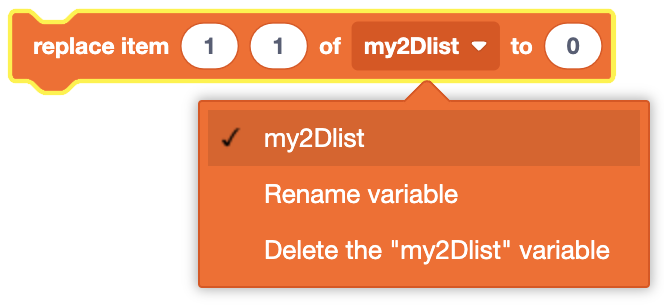
替换二维列表项块可以接受小数、整数或数字块。
在此示例中,传动系统将向前行驶 2 秒。停止前,它会将机器人当前的 Y 坐标记录在其 moveCoordinates 二维列表的第一行第二列中。
当开始
驱动 [向前 v]
等待 (2) 秒
将 ([Y v] 位标为 [毫米 v]) 元素 (1)(2) 置换为 [moveCoordinates v]
驱动停止
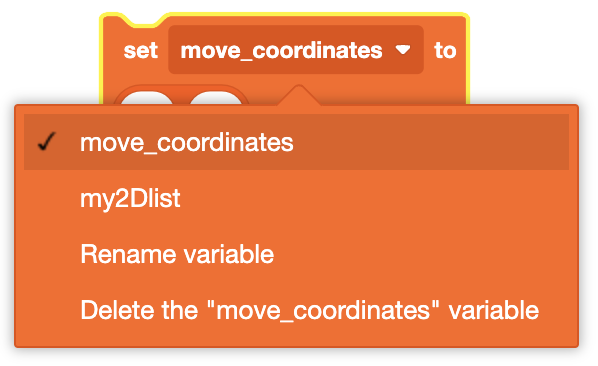
设置二维列表项#
设置二维列表项 块用于将二维列表中的每个项设置为输入的值。变量默认创建为全局变量。
设定 [move_coordinates v] 为 ((0) (0)) ((0) (0))
选择要使用的二维列表。二维列表也可以重命名或删除。
设置二维列表项块可以接受小数、整数或数字块。
在此示例中,move_coordinates 二维列表用于存储与操场上位置相关的数值。假设机器人从坐标 (0, 0) 开始,传动系统将使用二维列表中 (1,1) 和 (1,2) 项移动到坐标 (300, 150)。
当开始
设定 [move_coordinates v] 为 ((300) (150)) ((500) (200))
驱动 [向前 v] ([move_coordinates v] 元素 (1)(1)) [毫米 v] ▶
[右 v] 转 (90) 度 ▶
驱动 [向前 v] ([move_coordinates v] 元素 (1)(2)) [毫米 v] ▶
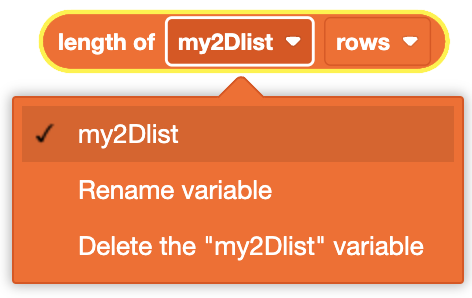
二维列表的长度#
2D 列表的长度块用于报告 2D 列表中的行数或列数。
([my2Dlist v] 的 [rows v] 数)
选择要使用的二维列表。二维列表也可以重命名或删除。
选择要报告的值。二维列表可以报告行或列。
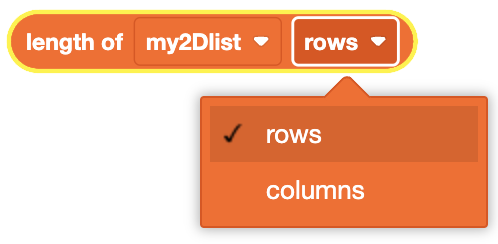
2D 列表的长度报告块适合接受圆形空间的块。
在这个例子中,机器人将打印“moveCoordinates”2D列表中有多少行。
当开始
打印 ([moveCoordinates v] 的 [rows v] 数) ▶