Inercial#
Introducción#
El robot de codificación VEX AIM cuenta con un sensor inercial integrado. Este sensor mide cómo se mueve y gira el robot.
El sensor inercial utiliza dos componentes para lograr esto. El giroscopio mide los giros, como la dirección, la rotación, la velocidad de giro y la orientación del robot. El acelerómetro mide los cambios en el movimiento, como acelerar, desacelerar o detenerse repentinamente durante una colisión.
Los bloques inerciales se pueden utilizar para rastrear giros, medir la aceleración, detectar colisiones y restablecer los valores de rumbo o rotación.
A continuación se muestra una lista de todos los bloques:
Valores: Informar sobre datos de orientación y movimiento.
encabezado — Informa la dirección en la que apunta el robot, de 0 a 359,99 grados.
rotación — Informa cuánto ha girado el robot.
aceleración — Informa qué tan rápido el robot está acelerando o desacelerando en el eje seleccionado.
obtener velocidad de giro — Informa qué tan rápido está girando el robot en el eje seleccionado.
orientación — Informa el ángulo de balanceo, cabeceo o guiñada del robot.
Acciones: Responder a colisiones o restablecer los valores de giro.
cuando se estrella — Ejecuta los bloques adjuntos cuando el robot detecta un impacto repentino.
establecer sensibilidad de choque — Ajusta la sensibilidad de la detección de choques a los impactos.
restablecer rumbo — Restablece el valor de rumbo del robot a 0 grados.
restablecer rotación — Restablece el valor de rotación del robot a 0 grados.
Valores#
título#
El rumbo es la dirección hacia la que apunta el robot, medida en grados de 0 a 359,99. El bloque de informe heading informa del rumbo actual del robot.
La orientación inicial es de 0 grados. Si el robot gira más allá de los 359,99 grados, la orientación vuelve a 0 grados.
rumbo en grados
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplos
cuando empezó
[Turn right until the heading reaches 90 degrees.]
turno [derecha v]
esperar [0.05] segundos
esperar hasta <(rumbo en grados) [math_greater_than v] [90]>
detener todo movimiento
cuando empezó
[Display the robot's heading as it is rotated by hand.]
para siempre
Limpiar la fila [1] de la pantalla
Coloque el cursor en la fila [1] columna [1] en la pantalla
imprimir (rumbo en grados) en la pantalla ▶
esperar [0.05] segundos
rotación#
La rotación indica cuánto ha girado el robot, medida en grados. A diferencia del rumbo, la rotación puede superar los 359,99 grados o disminuir por debajo de 0 grados. Al inicio de un proyecto, el valor de rotación se establece en 0 grados. El bloque de informe de rotación informa sobre la rotación actual del robot.
Girar a la derecha aumenta la rotación, y girar a la izquierda la disminuye. Por ejemplo, dos giros completos a la derecha darán como resultado una rotación de 720 grados. Un giro completo a la izquierda desde 0 grados dará como resultado una rotación de -360 grados.
(rotación en grados)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Print the rotation value as the robot turns.]
girar [derecha v] por [480] grado ◀ y no esperes
para siempre
pantalla clara
Coloque el cursor en la fila [1] columna [1] en la pantalla
imprimir (rotación en grados) en la pantalla ▶
aceleración#
La aceleración indica la rapidez con la que el robot aumenta o disminuye su velocidad. El bloque de informe de aceleración informa la aceleración del robot a lo largo del eje seleccionado, desde -4,00 G hasta 4,00 G.
Una G es una unidad que se utiliza para medir la aceleración. 1 G equivale aproximadamente a la aceleración que sientes debido a la gravedad cuando estás sentado en reposo.
El valor puede ser positivo o negativo según la dirección de la aceleración en el eje seleccionado. En AIM, las opciones de eje se denominan según las direcciones del robot: adelante, a la derecha y abajo.
(aceleración del eje [adelante v] en g :: custom-controller-inertial-timer)
Parámetros |
Descripción |
|---|---|
eje |
El eje para medir la aceleración:
|

Ejemplo
cuando empezó
[Show the change in acceleration as the robot begins to move.]
Coloque el cursor en la fila [4] columna [1] en la pantalla
imprimir (unirse [Resting: ] (aceleración del eje [hacia la derecha v] en g :: custom-controller-inertial-timer)) en la pantalla ▶
Colocar el cursor en la siguiente fila de la pantalla
esperar [0.5] segundos
mover [derecha v] por [50] [mm v] ◀ y no esperes
esperar [0.1] segundos
imprimir (unirse [Startup: ] (aceleración del eje [hacia la derecha v] en g :: custom-controller-inertial-timer)) en la pantalla ▶
obtener velocidad de giro#
La velocidad de giro indica la rapidez con la que rota el robot. El bloque de informe obtener velocidad de giro informa la velocidad de rotación actual del robot a lo largo del eje seleccionado en grados por segundo \(dps\), como un número entero.
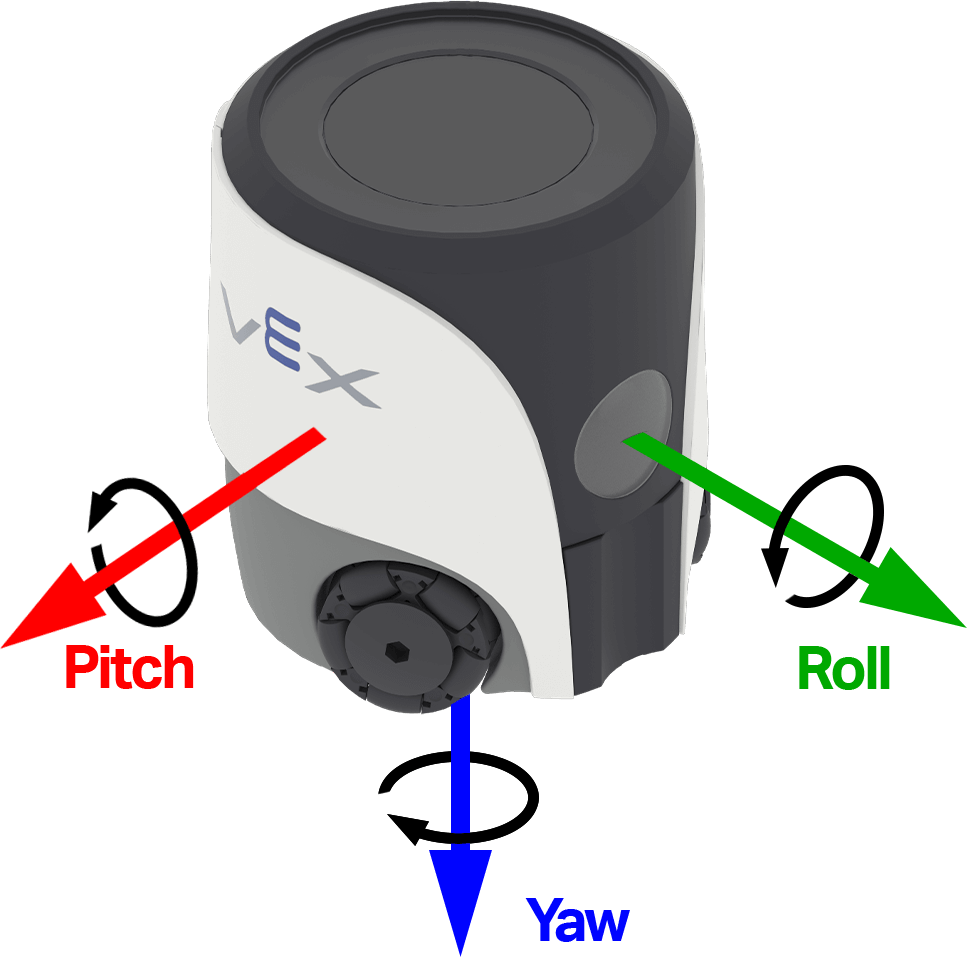
El valor puede ser positivo o negativo según la dirección de rotación del robot sobre ese eje. La imagen a continuación utiliza flechas para mostrar la dirección de rotación positiva para el balanceo, el cabeceo y la guiñada.
(Obtener la velocidad de giro del eje [guiñada v] en dps)
Parámetros |
Descripción |
|---|---|
eje |
Ejes para informar la velocidad de giro:
|
Ejemplo
cuando empezó
[Observe the yaw turn rate as the robot turns.]
girar [derecha v] por [180] grado ◀ y no esperes
para siempre
pantalla clara
Coloque el cursor en la fila [1] columna [1] en la pantalla
imprimir (Obtener la velocidad de giro del eje [guiñada v] en dps) en la pantalla ▶
orientación#
La orientación es el ángulo actual del robot en un eje de giro seleccionado. El bloque de informe de orientación informa el balanceo, cabeceo o guiñada del robot, desde -180,00 hasta 180,00 grados, como un número decimal.
El balanceo, el cabeceo y la guiñada describen las diferentes formas en que el robot puede inclinarse o girar. La imagen a continuación utiliza flechas para mostrar la dirección de rotación positiva para el balanceo, el cabeceo y la guiñada.
orientación de [guiñada v] en grados
Parámetros |
Descripción |
|---|---|
eje |
Eje de orientación a informar:
|
Ejemplo
cuando empezó
[Display the robot's orientation as it is rotated by hand.]
para siempre
Limpiar la fila [1] de la pantalla
Coloque el cursor en la fila [1] columna [1] en la pantalla
imprimir (orientación de [rollo v] en grados) en la pantalla ▶
esperar [0.05] segundos
Comportamiento#
cuando se estrelló#
El bloque de detección de colisiones cuando se produce un choque ejecuta la pila adjunta cuando el robot detecta un impacto o colisión repentina. La detección de colisiones utiliza el acelerómetro y la sensibilidad actual a las colisiones.
cuando se estrelló
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Start moving forward.]
establecer la velocidad de movimiento al [100]%
movimiento [adelante v]
cuando se estrelló
[Respond when a crash is detected.]
detener todo movimiento
reproducir sonido [choque v] ▶
establecer la sensibilidad al choque#
El bloque de pila establecer sensibilidad al choque ajusta la cantidad de aceleración repentina necesaria para que el robot detecte un choque.
Establezca la sensibilidad al choque en [bajo v]
Parámetros |
Descripción |
|---|---|
sensibilidad |
Sensibilidad del robot para detectar colisiones:
|
Ejemplo
cuando empezó
[Move slowly with high crash sensitivity.]
establecer la velocidad de movimiento al [35]%
Establezca la sensibilidad al choque en [alto v]
movimiento [adelante v]
cuando se estrelló
[Respond when a crash is detected.]
detener todo movimiento
reproducir sonido [choque v] ▶
restablecer el encabezado#
El bloque restablecer rumbo restablece el rumbo actual del robot a 0 grados. Una vez ejecutado este bloque, la dirección en la que apunta el robot se convierte en el nuevo rumbo de 0 grados.
restablecer el encabezado
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Face left before turning around.]
girar hacia el rumbo [270] grados ▶
restablecer el encabezado
esperar [1] segundos
girar hacia el rumbo [180] grados ▶
restablecer rotación#
El bloque Restablecer rotación restablece el valor de rotación actual del robot a 0 grados. Una vez ejecutado este bloque, el robot realiza los giros futuros a partir del nuevo valor de rotación de 0 grados.
restablecer rotación
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Turn for 480 degrees before resetting rotation.]
girar [derecha v] por [480] grado ▶
restablecer rotación
para siempre
pantalla clara
Coloque el cursor en la fila [1] columna [1] en la pantalla
imprimir (rotación en grados) en la pantalla ▶