Movimiento#
Girar#
El bloque Girar se utiliza para girar un motor o un grupo de motores indefinidamente.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
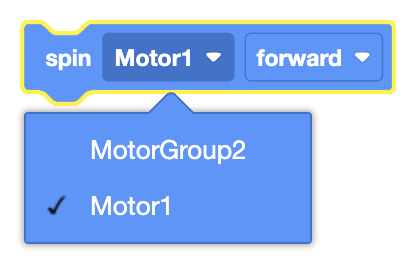
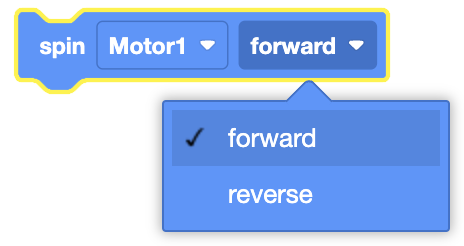
girar [Motor 1 v] [adelante v]
Seleccione qué motor o grupo de motores utilizar.
Seleccione en qué dirección se moverá el motor o el grupo de motores.
En este ejemplo, el motor girará hacia adelante durante 1 segundo antes de detenerse.
cuando empezó
girar [Motor 1 v] [adelante v]
esperar (1) segundos
parada [Motor 1 v]
Girar para#
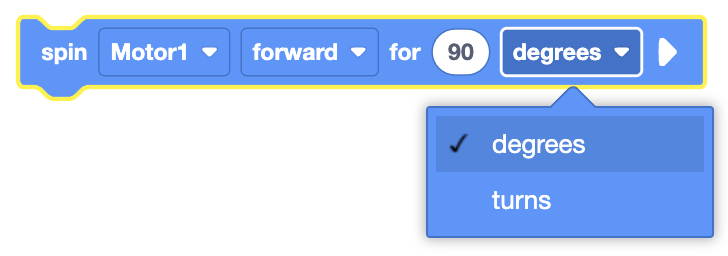
El bloque Girar para se utiliza para girar un motor o un grupo de motores durante una distancia determinada.
Este puede ser un bloque sin espera o en espera dependiendo de si se utiliza la opción y no esperar.
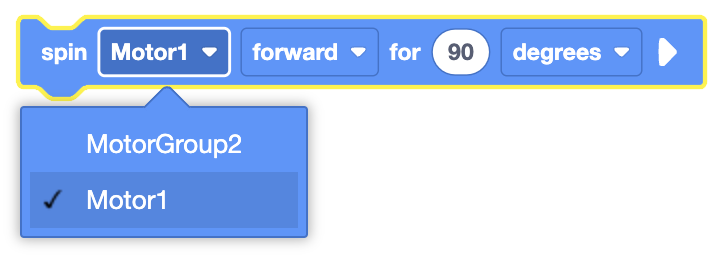
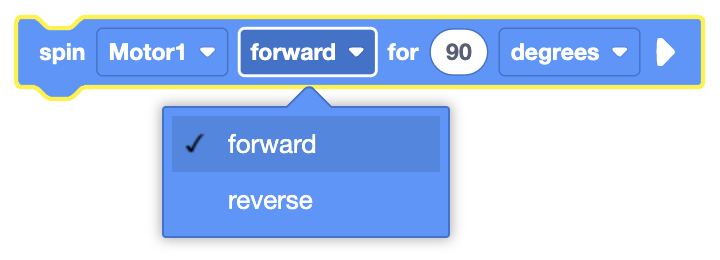
girar [Motor 1 v] [adelante v] por (90) [grados v] ▶
Seleccione qué motor o grupo de motores utilizar.
Seleccione en qué dirección se moverá el motor o el grupo de motores.
Establezca la distancia que girará el motor o el grupo de motores ingresando un valor y eligiendo la unidad de medida (grados o vueltas).
Por defecto, el bloque Girar Durante bloqueará la ejecución de los bloques subsiguientes hasta que finalice. Al expandir el bloque Girar Durante para mostrar y no esperar, los bloques continuarán ejecutándose mientras el motor o el grupo de motores esté en movimiento.
girar [Motor 1 v] [adelante v] por (1) [giros v] ◀ y no esperes
En este ejemplo, el motor girará hacia adelante durante 1 vuelta.
cuando empezó
girar [Motor 1 v] [adelante v] por (1) [giros v] ▶
Girar a la posición#
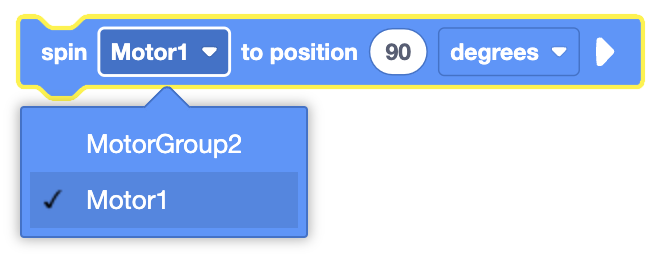
El bloque Girar a posición se utiliza para girar un motor o un grupo de motores a una posición determinada.
Este puede ser un bloque sin espera o en espera dependiendo de si se utiliza la opción y no esperar.
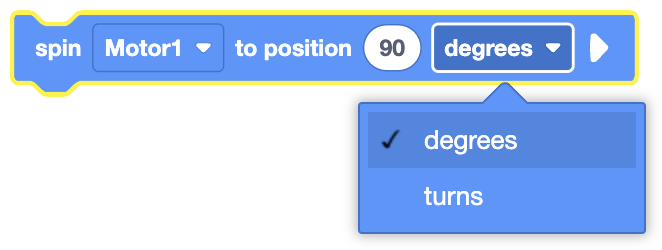
girar [Motor 1 v] a la posición (90) [grados v] ▶
Seleccione qué motor o grupo de motores utilizar.
Establezca la distancia que girará el motor o el grupo de motores ingresando un valor y eligiendo la unidad de medida (grados o vueltas).
Por defecto, el bloque Girar a Posición bloqueará la ejecución de los bloques subsiguientes hasta que finalice. Al expandir el bloque Girar a Posición para mostrar y no esperar, los bloques continuarán ejecutándose mientras el motor esté en movimiento.
girar [Motor 1 v] a la posición (90) [grados v] ◀ y no esperes
En este ejemplo, el motor girará a la posición de 270 grados.
cuando empezó
girar [Motor 1 v] a la posición (270) [grados v] ▶
Detener el motor#
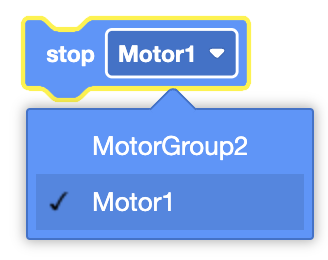
El bloque Detener motor se utiliza para detener el movimiento del motor o del grupo de motores.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
parada [Motor 1 v]
Seleccione qué motor o grupo de motores utilizar.
En este ejemplo, los motores de admisión girarán en la dirección de admisión durante 1 segundo antes de detenerse.
cuando empezó
girar [Motor 1 v] [adelante v]
esperar (1) segundos
parada [Motor 1 v]
Establecer la posición del motor#
El bloque Establecer posición del motor se utiliza para establecer la posición del codificador de un motor o grupo de motores en el valor ingresado.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
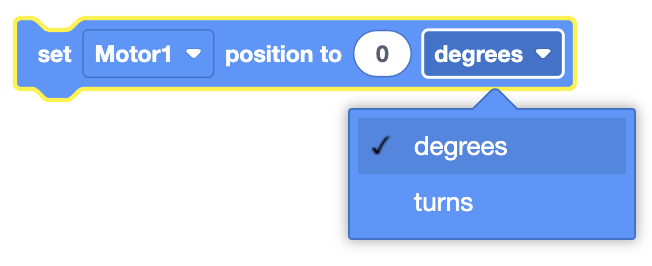
Establezca la posición [Motor 1 v] en (0) [grados v]
Seleccione qué motor o grupo de motores utilizar.
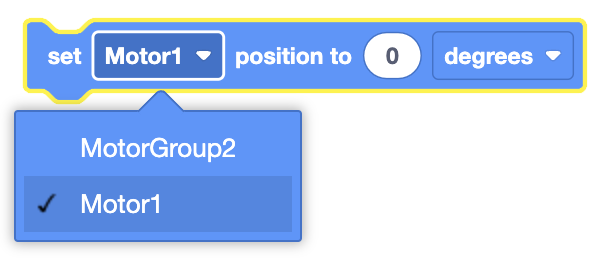
Establezca la unidad de medida a utilizar, grados o vueltas.
En este ejemplo, la posición del codificador del motor se establece en 90 grados antes de que el motor gire a la posición de 0 grados.
cuando empezó
Establezca la posición [Motor 1 v] en (90) [grados v]
girar [MotorGroup2 v] a la posición (0) [grados v] ▶
Establecer la velocidad del motor#
El bloque Establecer velocidad del motor se utiliza para establecer la velocidad de un motor o un grupo de motores.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
Establezca la velocidad [Motor 1 v] en (50) [% v]
Seleccione qué motor o grupo de motores utilizar.
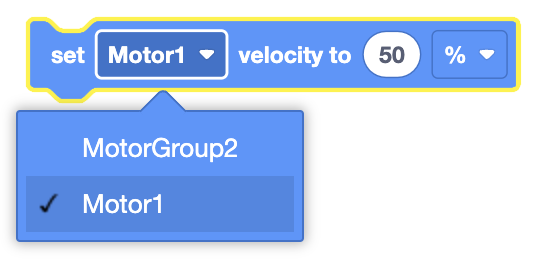
El bloque Establecer velocidad del motor aceptará un rango de -100% a 100%.
En este ejemplo, el motor girará hacia adelante durante 1 vuelta antes de establecer su velocidad al 75 % antes de girar en reversa durante 1 vuelta.
cuando empezó
girar [Motor 1 v] [adelante v] por (1) [giros v] ▶
Establezca la velocidad [Motor 1 v] en (75) [% v]
girar [Motor 1 v] [atrás v] por (1) [giros v] ▶
Establecer la parada del motor#
El bloque Establecer detención del motor se utiliza para establecer el comportamiento del motor o del grupo de motores cuando dejan de moverse.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
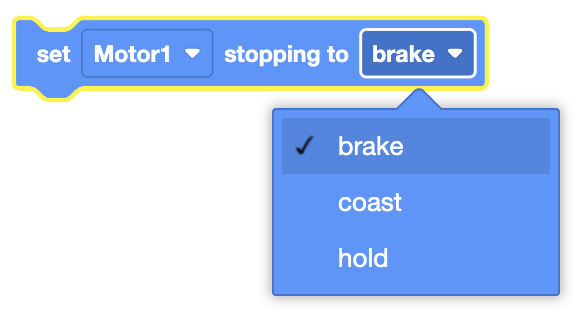
establecer [Motor 1 v] deteniéndose en [freno v]
Seleccione qué motor o grupo de motores utilizar.
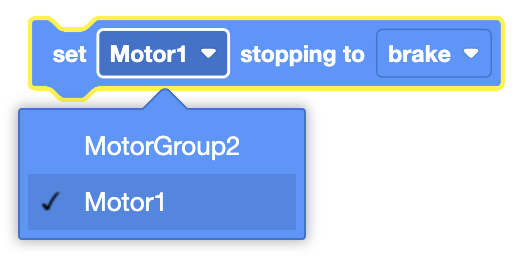
Seleccione qué comportamiento de detención utilizar.
Los tres comportamientos de detención del vehículo son los siguientes:
Freno: El motor o el grupo de motores se detendrá inmediatamente.
Costa: El motor o el grupo de motores girará gradualmente hasta detenerse.
Retención: El motor o grupo de motores se detendrá inmediatamente. Si una fuerza externa lo hace girar, el codificador integrado lo devolverá a su posición inicial de parada.
En este ejemplo, el motor se mueve durante 2 segundos antes de detenerse por inercia.
cuando empezó
[Set the motor's stopping mode to coast.]
establecer [Motor 1 v] deteniéndose en [libre v]
[Spin the motor forward for 2 seconds before stopping.]
girar [Motor 1 v] [adelante v]
esperar (2) segundos
parada [Motor 1 v]
Establecer el par máximo del motor#
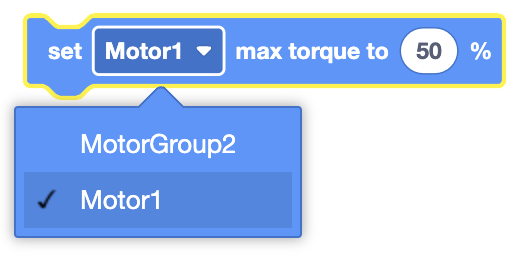
El bloque Ajustar par máximo del motor permite ajustar la potencia del motor inteligente EXP o del grupo de motores. Este bloque admite un rango de 0 % a 100 %.
Este es un comando sin espera y permite que cualquier comando posterior se ejecute sin demora.
set [Motor1 v] max torque to (50)%
Seleccione qué motor o grupo de motores utilizar.
En este ejemplo, el torque del motor se establece al 80% antes de girar a la posición de 350 grados.
cuando empezó
set [Motor1 v] max torque to (80)%
girar [Motor 1 v] a la posición (350) [grados v] ▶
Establecer tiempo de espera del motor#
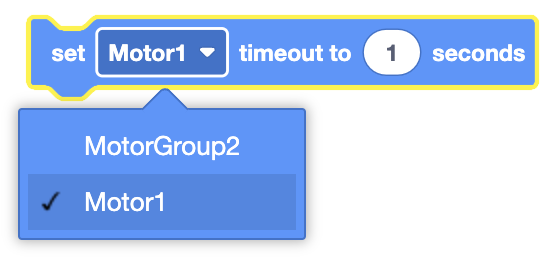
El bloque Establecer tiempo de espera del motor se utiliza para establecer un límite de tiempo para los bloques de movimiento del motor inteligente EXP o del grupo de motores.
El límite de tiempo del motor o grupo de motores se utiliza para evitar que los bloques de movimiento que no alcanzan su posición impidan el movimiento de otros bloques en la pila. Un ejemplo de un motor o grupo de motores que no alcanza su posición es un brazo o garra que alcanza su límite mecánico y no puede completar su movimiento.
Este es un comando sin espera y permite que cualquier comando posterior se ejecute sin demora.
Establezca el tiempo de espera [Motor 1 v] en (1) segundo
Seleccione qué motor o grupo de motores utilizar.
En este ejemplo, el motor está configurado para girar hacia adelante durante 5 vueltas con un tiempo de espera de 1 segundo. El motor no alcanzará la posición objetivo en 1 segundo, por lo que el bloque Girar se detendrá automáticamente y el motor volverá a la posición de 0 grados.
cuando empezó
[Set the motor's timeout to 1 second.]
Establezca el tiempo de espera [Motor 1 v] en (1) segundo
girar [Motor 1 v] [adelante v] por (5) [giros v] ▶
girar [Motor 1 v] a la posición (0) [grados v] ▶