Eventos#
Cuando empezó#
El bloque Al iniciar se utiliza para ejecutar la pila de bloques adjunta cuando se inicia el proyecto.
cuando empezó
Se ejecutará un evento de inicio cuando se inicie el proyecto desde el botón de inicio en VEXcode Blocks.
Todos los proyectos nuevos incluirán automáticamente un bloque de cuándo se inició.
En este ejemplo, se utiliza el bloque Al iniciar para iniciar el proyecto. Al pulsar el botón de inicio, el robot avanzará, girará a la derecha y volverá a avanzar.
cuando empezó
unidad [adelante v] para (200) [mm v] ▶
girar [derecha v] por (90) grado ▶
unidad [adelante v] para (200) [mm v] ▶
Cuando el eje del controlador#
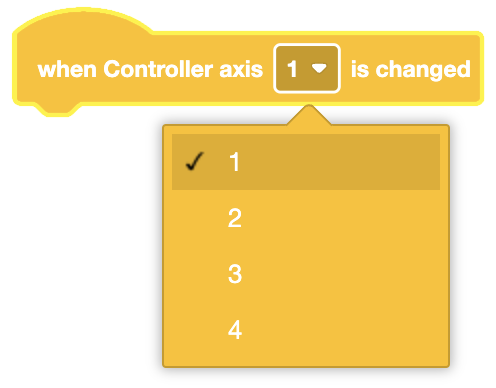
El bloque Cuando el eje del controlador se usa para ejecutar la pila de bloques adjunta cuando se mueve el eje del joystick del controlador EXP seleccionado.
Cuando se cambia el eje [1 v] del controlador
Elige qué eje del joystick del controlador EXP utilizar.
En este ejemplo, al mover el ejeo del joystick en el controlador EXP se imprimirá un mensaje.
Cuando se cambia el eje [4 v] del controlador
imprimir [Controller axis 4 moved.] en [Brain v] ◀ y coloque el cursor en la siguiente fila
Cuando parachoques#
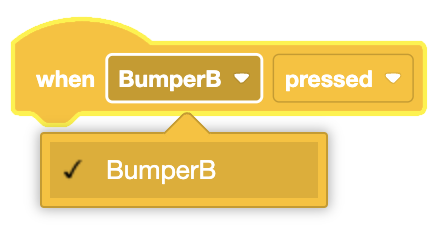
El bloque Cuando Bumper se usa para ejecutar la pila de bloques adjunta cuando se presiona o suelta el sensor del interruptor Bumper seleccionado.
cuando [BumperB v] [presionado v]
Elige qué parachoques utilizar.
Seleccione qué acción activará el evento: presionado o liberado.
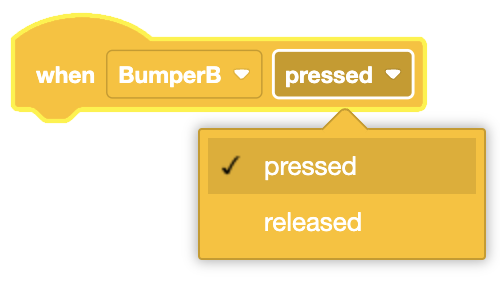
En este ejemplo, cuando se presiona el sensor del interruptor del parachoques, se imprimirá un mensaje en el cerebro.
cuando [BumperB v] [presionado v]
imprimir [Bumper has been pressed.] en [Brain v] ◀ y coloque el cursor en la siguiente fila
Cuando el límite#
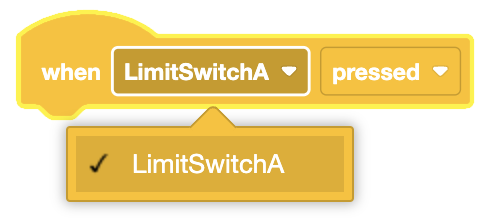
El bloque Cuando hay límite se utiliza para ejecutar la pila de bloques adjunta cuando se presiona o se suelta el sensor del interruptor de límite seleccionado.
cuando [LimitSwitchA v] [presionado v]
Elija qué interruptor de límite utilizar.
Seleccione qué acción activará el evento: presionado o liberado.
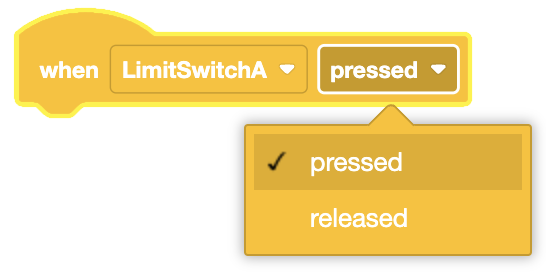
En este ejemplo, cuando se presiona el sensor del interruptor de límite, se imprimirá un mensaje en el cerebro.
cuando [LimitSwitchA v] [presionado v]
imprimir [Limit Switch has been pressed.] en [Brain v] ◀ y coloque el cursor en la siguiente fila
Cuando el temporizador#
El bloque Cuando el temporizador se utiliza para ejecutar la pila de bloques adjunta cuando el temporizador del cerebro es igual al valor dado.
cuando el temporizador > (1) segundos
El temporizador del Cerebro comienza al comienzo de cada proyecto o cuando se reinicia el temporizador del Cerebro.
Seleccione un tiempo. El evento del temporizador se ejecutará cuando el temporizador del cerebro alcance el tiempo especificado.
cuando el temporizador > (3.25) segundos
En este ejemplo, después de que transcurran 5 segundos, el Robot imprimirá el mensaje en la Consola de Impresión.
cuando el temporizador > (5) segundos
imprimir [5 seconds have passed.] ▶
Cuando recibo#
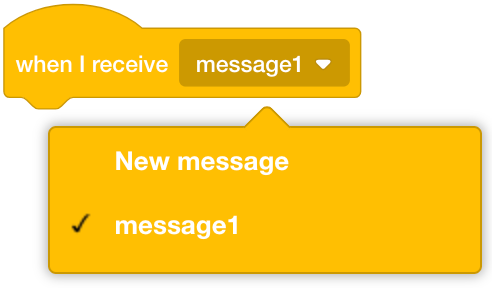
El bloque Cuando recibo se utiliza para ejecutar la pila de bloques adjunta cuando se recibe el mensaje seleccionado de un mensaje transmitido.
cuando recibo (message1 v)
Elige el mensaje que quieres escuchar. También puedes crear un nuevo mensaje.
En este ejemplo, el código comprobará continuamente si se presionó el parachoques del sensor izquierdo. Una vez presionado, el bloque Cuando recibo se activará al recibir el mensaje bumper_press.
cuando empezó
para siempre
si <[LeftBumper v] presionado?> entonces
transmisión [bumper_press v]
fin
fin
cuando recibo [bumper_press v]
imprimir [Bumper has been pressed] ▶
Transmisión#
El bloque Transmisión se utiliza para transmitir un mensaje para activar cualquier pila que comience con un bloque Cuando recibo que escuche el mensaje transmitido.
transmisión [message1 v]
La pila que envía la transmisión continuará ejecutando bloques al mismo tiempo que otras pilas que reciben el mensaje transmitido.
Elige el mensaje que quieres difundir. También puedes crear un nuevo mensaje.

En este ejemplo, el código comprobará continuamente si se presionó el parachoques del sensor izquierdo. Una vez presionado, el bloque Transmitir activará el bloque Cuando recibo con el mensaje bumper_press.
cuando empezó
para siempre
si <[LeftBumper v] presionado?> entonces
transmisión [bumper_press v]
fin
fin
cuando recibo [bumper_press v]
imprimir [Bumper has been pressed] ▶
Transmitir y esperar#
El bloque Transmitir y esperar se utiliza para transmitir un mensaje para activar cualquier pila que comience con un bloque Cuando recibo escuchando el mensaje transmitido mientras también pausa el resto de la pila.
Este bloque transmite un mensaje para activar cualquier pila que comience con un cuando recibo un bloque que escucha el mensaje transmitido y al mismo tiempo pausa el resto de la pila.
transmitir (message1 v) y esperar
La pila que envía la transmisión y espera se pausará hasta que las otras pilas que reciben el mensaje transmitido hayan completado su proceso.
Elige el mensaje que quieres difundir. También puedes crear un nuevo mensaje.
En este ejemplo, el código comprobará continuamente si se presionó el parachoques del sensor izquierdo. Una vez presionado, el bloque Transmitir y esperar activará el bloque Cuando recibo con el mensaje bumper_press. Ningún código del bloque Cuando se inicia se ejecutará hasta que todo el contenido del bloque Cuando recibo bumper_press haya finalizado.
cuando empezó
para siempre
si <[LeftBumper v] presionado?> entonces
transmitir [bumper_press v] y esperar
fin
fin
cuando recibo [bumper_press v]
girar [derecha v] por [90] grado ▶
Cuando el sensor óptico#
El bloque Cuando hay sensor óptico se utiliza para ejecutar la pila de bloques adjunta cuando el sensor óptico seleccionado detecta o pierde un objeto.
cuando [Optical 7 v] [detects v] un objeto
Elija un sensor óptico.
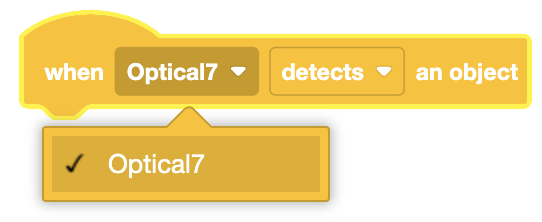
Elija si el evento Cuando el sensor óptico detecta/pierde se activa cuando el sensor detecta un objeto o pierde un objeto.
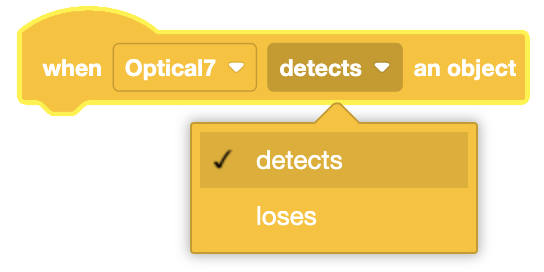
En este ejemplo, una vez que el sensor óptico haya detectado un objeto, se imprimirá un mensaje en el cerebro.
cuando [Optical 7 v] [detects v] un objeto
imprimir [Optical Sensor has detected an object.] en [Brain v] ◀ y coloque el cursor en la siguiente fila
Cuando el control se detuvo#
El bloque Cuando el control se detiene se utiliza para ejecutar la pila de bloques adjunta cuando se ha habilitado la parada de control del brazo.
Importante: Cuando la parada de control está habilitada en un proyecto, no se puede deshabilitar sin reiniciar el proyecto.
Cuando el control [Brazo1 v] se detuvo
Seleccione qué brazo robótico de 6 ejes utilizar.
En este ejemplo, una vez que se habilita la parada de control, se imprimirá en la pantalla del cerebro un mensaje que indica que el control se ha habilitado.
Cuando el control [Brazo1 v] se detuvo
imprimir [Arm's control stop has been enabled.] en [Brain v] ◀ y coloque el cursor en la siguiente fila
Cuando se presiona el parachoques de la torre de señales#
El bloque Cuando se presiona el parachoques de la torre de señales se usa para ejecutar la pila de bloques adjunta cuando se presiona el sensor de parachoques de la torre de señales.
cuando se presiona el parachoques [SignalTower 1 v]
Seleccione qué sensor de parachoques de la torre de señales desea utilizar.
En este ejemplo, el brazo de 6 ejes habilitará su parada de control cuando se presione el sensor de parachoques de la torre de señales.
cuando se presiona el parachoques [SignalTower 1 v]
Establecer [brazo v] para controlar la detención