Detalles del robot#
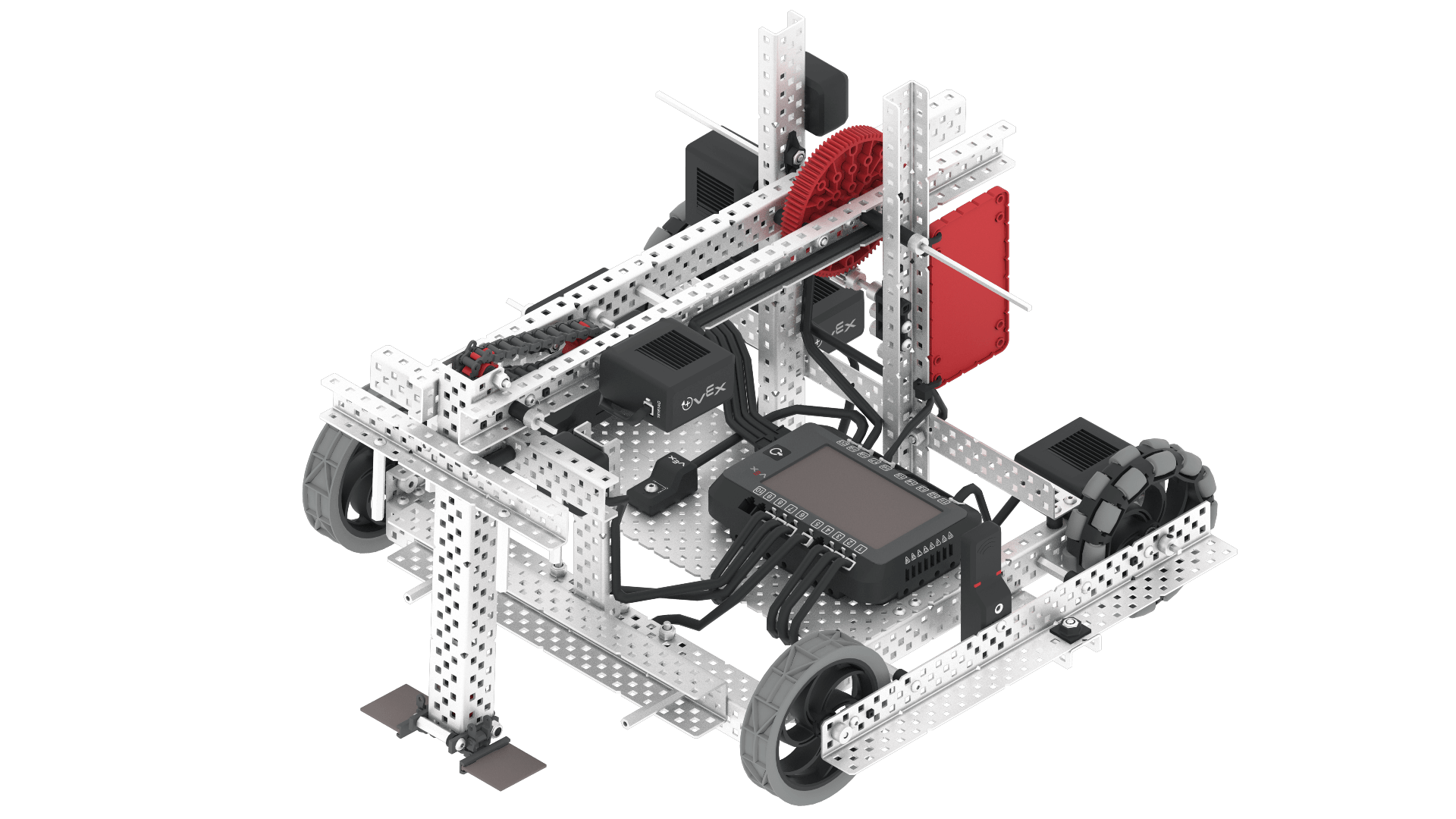
El patio de juegos V5RC Virtual Skills - High Stakes utiliza el robot héroe VEX V5 estándar, Axel.
El Axel VEX V5 Hero Bot mide aproximadamente 350 milímetros de largo y 280 milímetros de ancho.
Grupos motores#
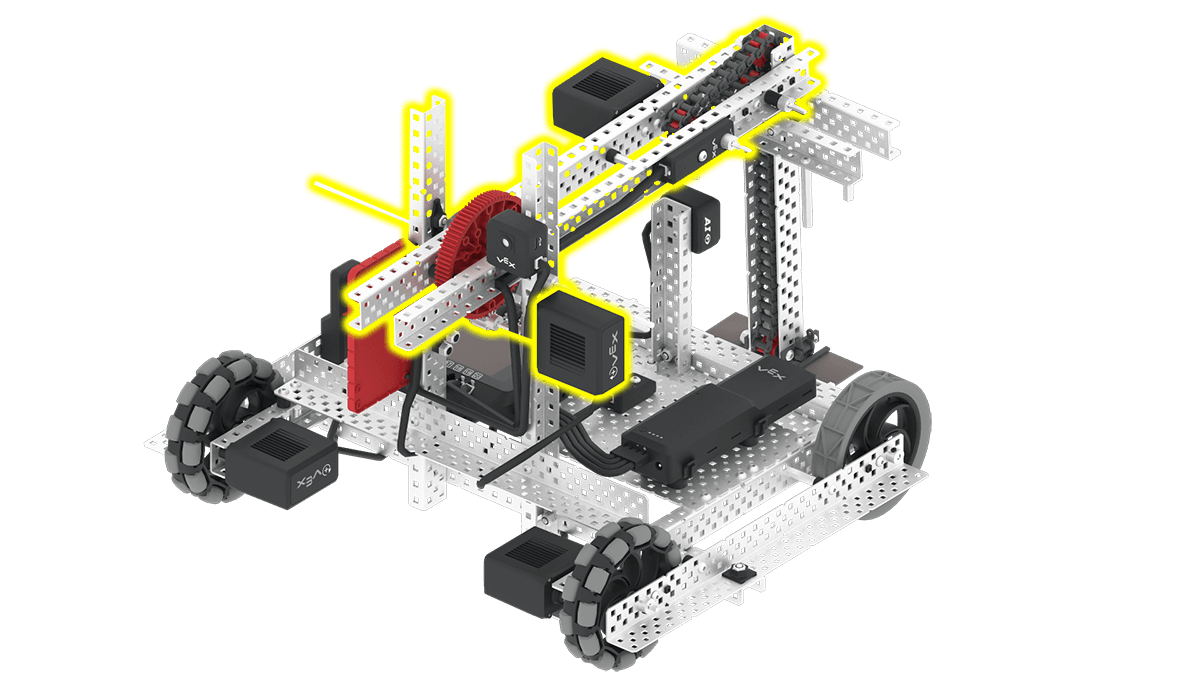
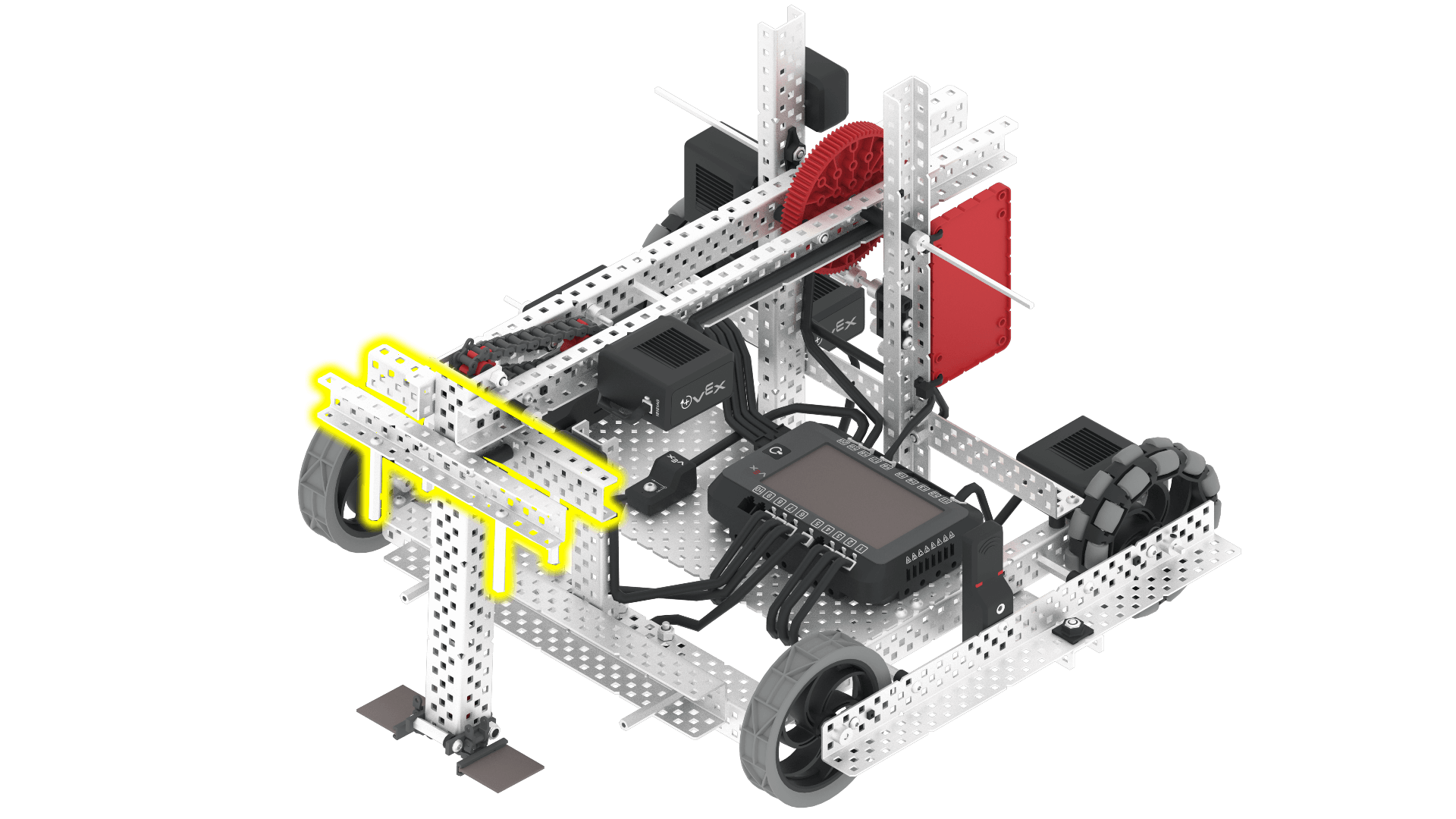
Axel está equipado con dos conjuntos de grupos motores para su brazo y empujador.
Configuración y nombre del comando Python |
Descripción |
Documentación de la API |
|---|---|---|
|
El brazo sube y baja el brazo de Axel. Debe estar elevado para no bloquear el sensor de visión de IA y para colocar los anillos en las estacas. Para elevar el brazo lo suficiente como para colocar un anillo en una estaca, debe estar |
|
|
El motor de empuje lo mueve hacia abajo por el brazo. Esto permite empujar los anillos desde el brazo hasta una estaca. La posición del empujador en la parte superior del brazo es de 0 grados. |
Sensores#
Axel tiene acceso a los siguientes sensores para codificación autónoma:
Configuración |
Descripción |
Documentación de la API |
Nombre del comando de Python |
|---|---|---|---|
Temporizador cerebral |
El robot tiene acceso a un temporizador incorporado. |
|
|
Inercial |
El robot tiene acceso a un sensor inercial para rastrear el rumbo actual del robot y el ángulo de rotación. |
|
|
Rotación |
El robot tiene acceso a un sensor de rotación para rastrear el ángulo de rotación y la posición actual del motor de empuje. |
|
|
Distancia frontal |
El robot tiene acceso a un sensor de distancia en su frente, que le permite ver qué tan lejos se encuentra actualmente el frente del robot de un objeto. |
|
|
Óptica frontal |
Informa si hay un objeto justo delante del robot. Esto también puede determinar el color del objeto, para que el robot pueda diferenciar entre anillos rojos, anillos azules o las porterías móviles amarillas. |
|
|
GPS (Sistema de posicionamiento de juegos™) |
Informa la posición actual en X e Y del centro de rotación del eje en milímetros o pulgadas. El sensor GPS también puede informar el rumbo actual en grados. |
|
|
Sensor de visión de IA |
Una cámara que puede diferenciar automáticamente entre elementos del juego, lo que permite que el robot se oriente hacia elementos específicos del juego de forma autónoma. |
|