机器人#
VEXcode VR 在免费版、增强版和高级版 Playground 中使用了多种机器人。本节按机器人而非 Playground 对机器人相关的 API 页面进行分组。
图像 |
机器人 |
用途 |
游乐场 |
|---|---|---|---|
|
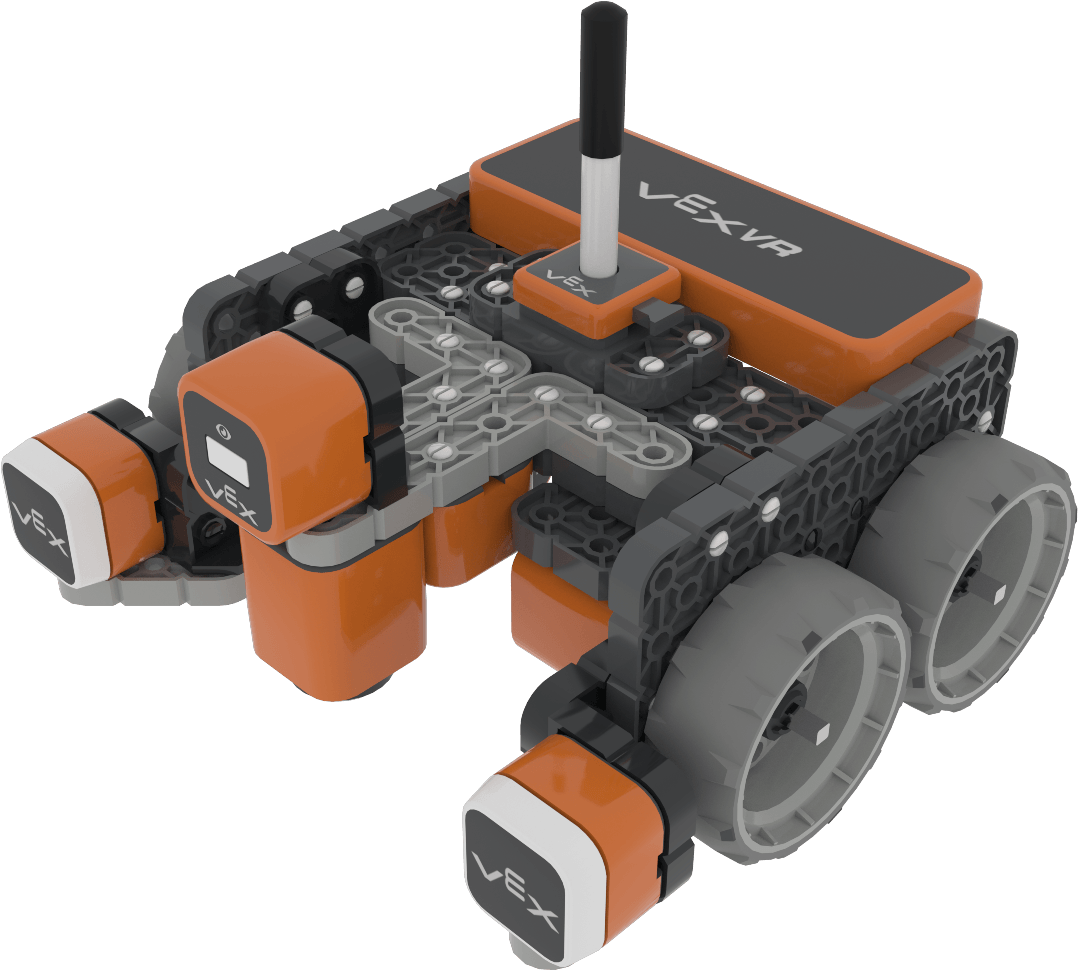
通用移动、感知、绘画和基于磁铁的交互,贯穿于入门级 VR 活动中。 |
艺术画布, 城堡破坏者, 圆盘迷宫, 圆盘移动器, 圆盘运输器, 动态城堡破坏者, 动态墙壁迷宫, 编码信息, 网格地图, 隐藏像素艺术, 线条检测器, 数字网格地图, 形状追踪器, 墙壁迷宫, 艺术画布+, 城堡破坏者+ |
|
|
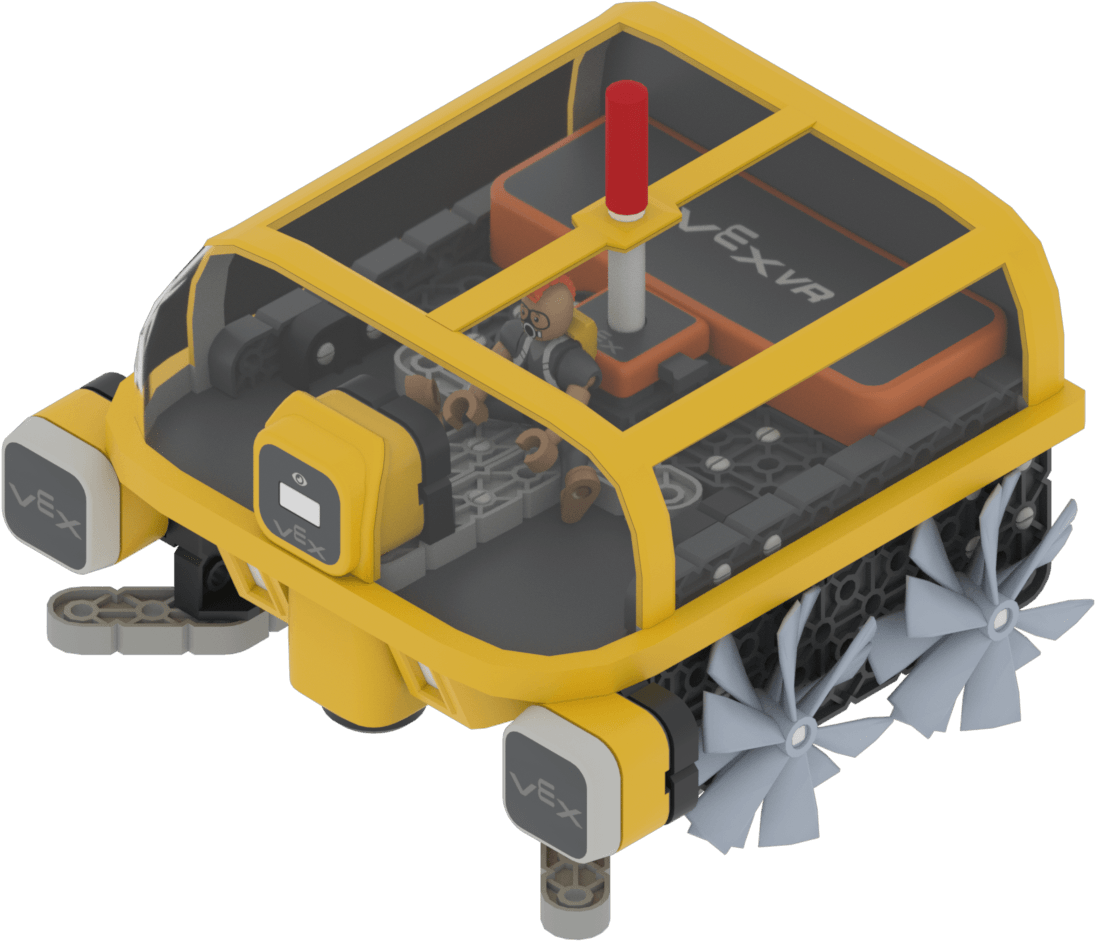
用于水下清理的VR机器人的防水版本。 |
||
|
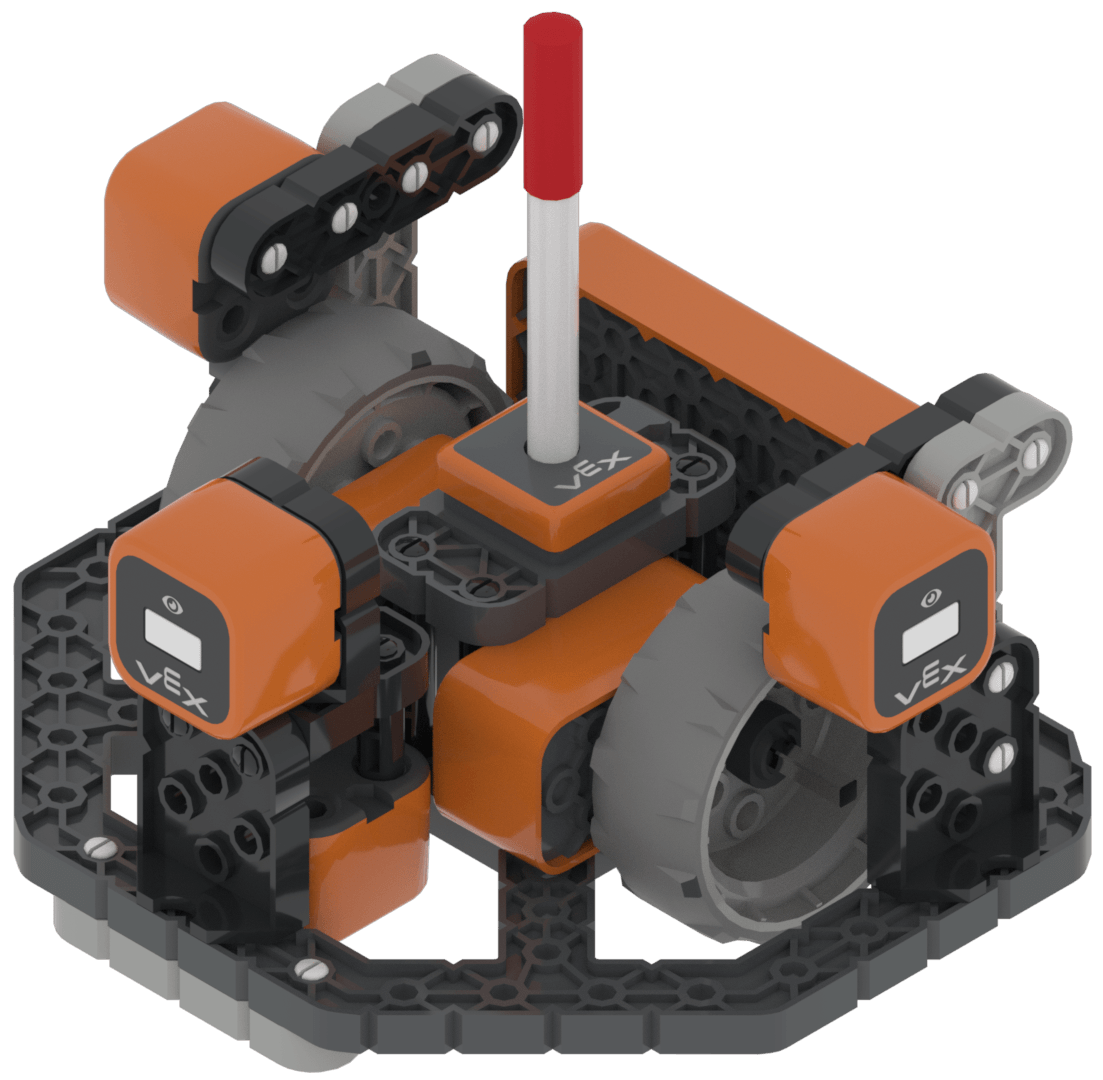
利用多个距离传感器和一个向下看的眼部传感器进行迷宫导航。 |
||
|
探索、矿物采集、与敌人互动以及生存式自主行为。 |
||
|
基于活动的早期机器人,具有运动、声音、LED 反馈、动作和传感功能。 |
||
|
利用机械臂电机和前置眼传感器驱动和操控火星场物体。 |
||
|
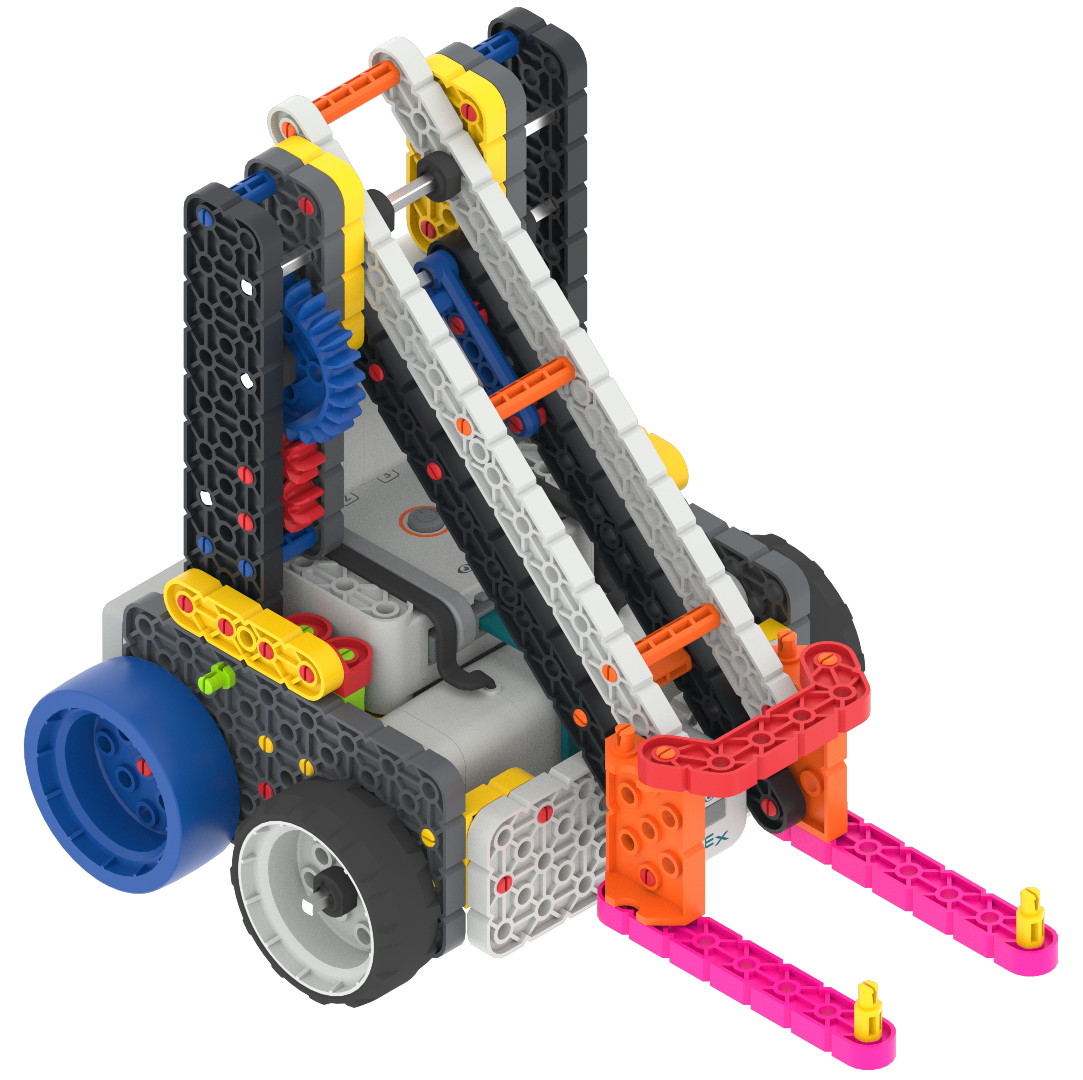
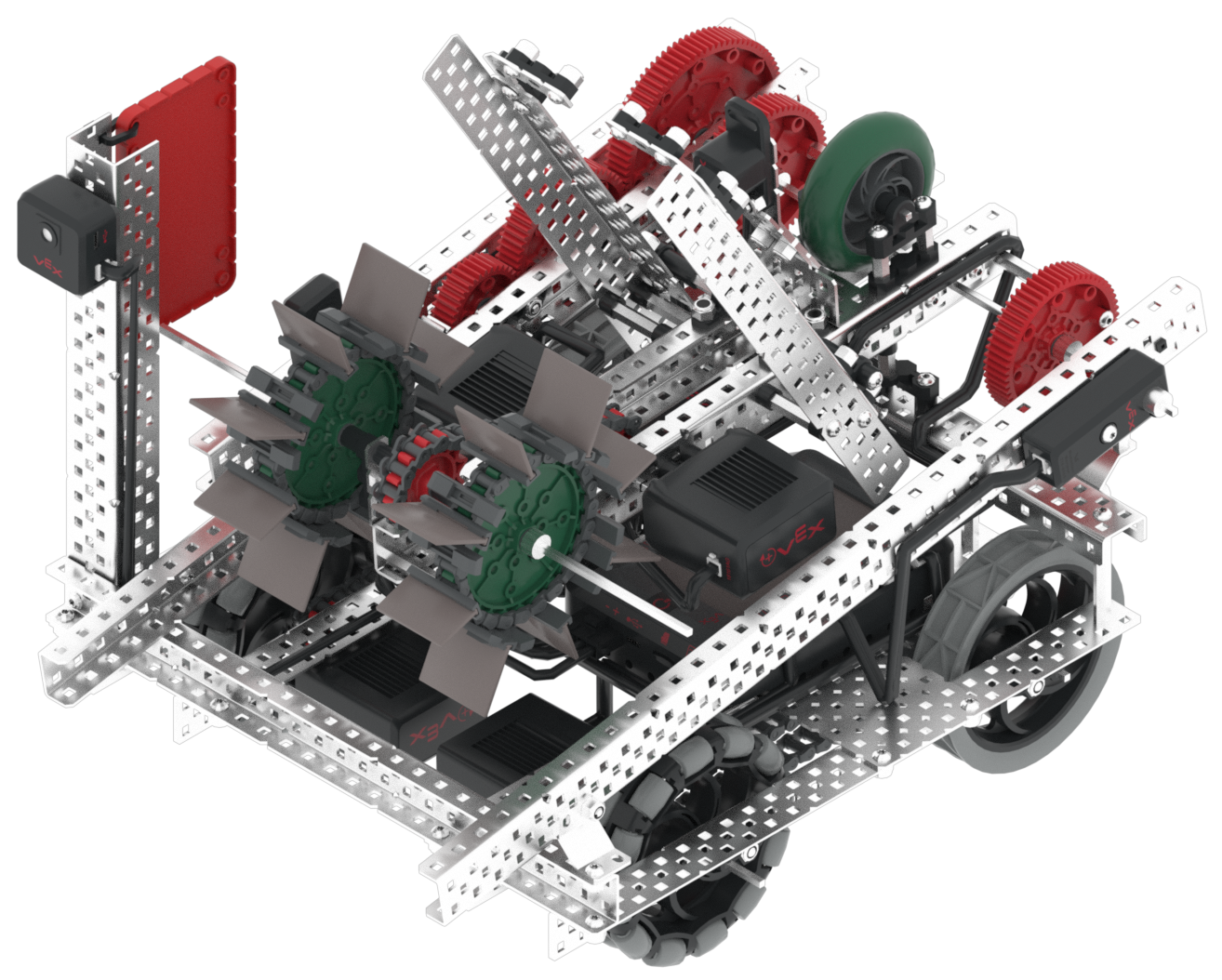
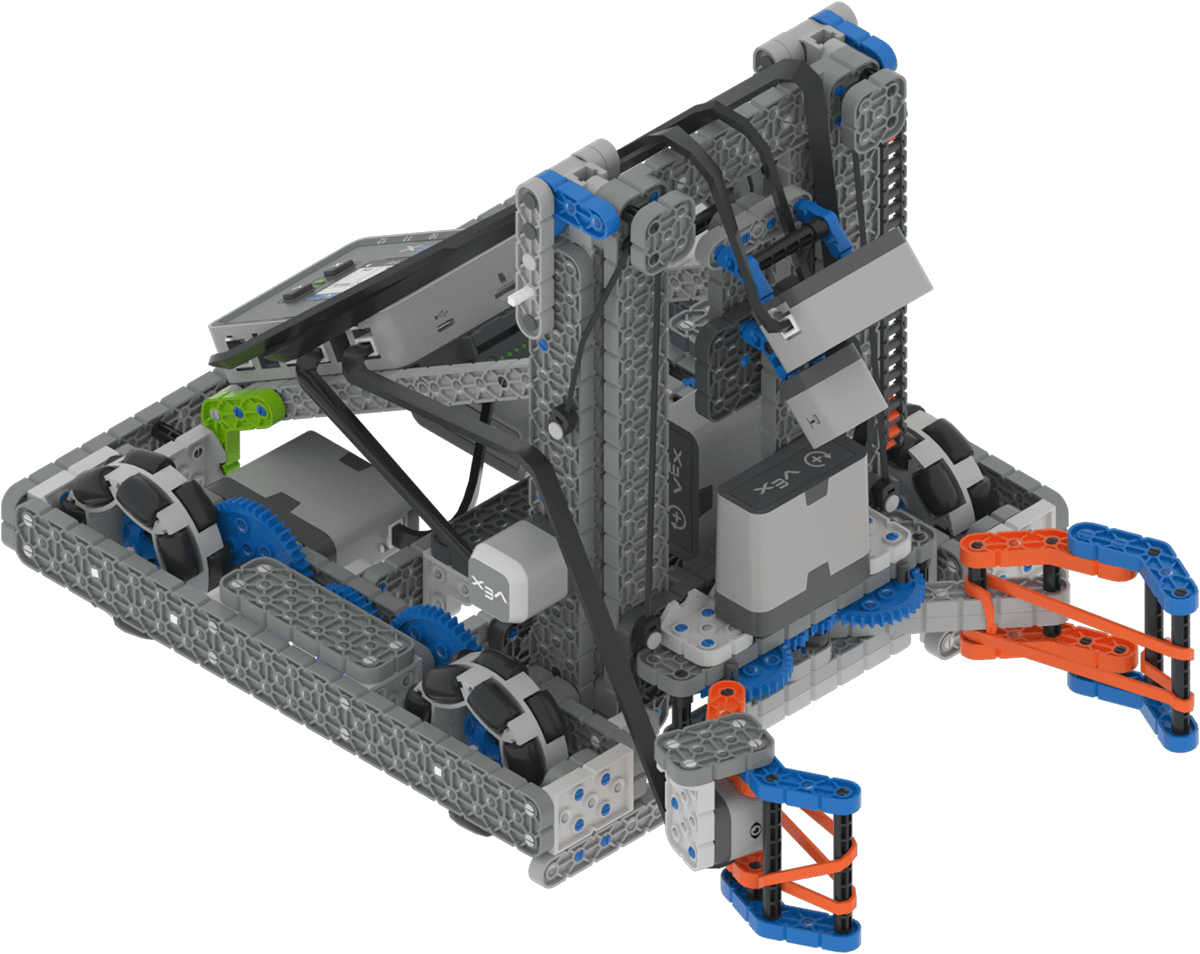
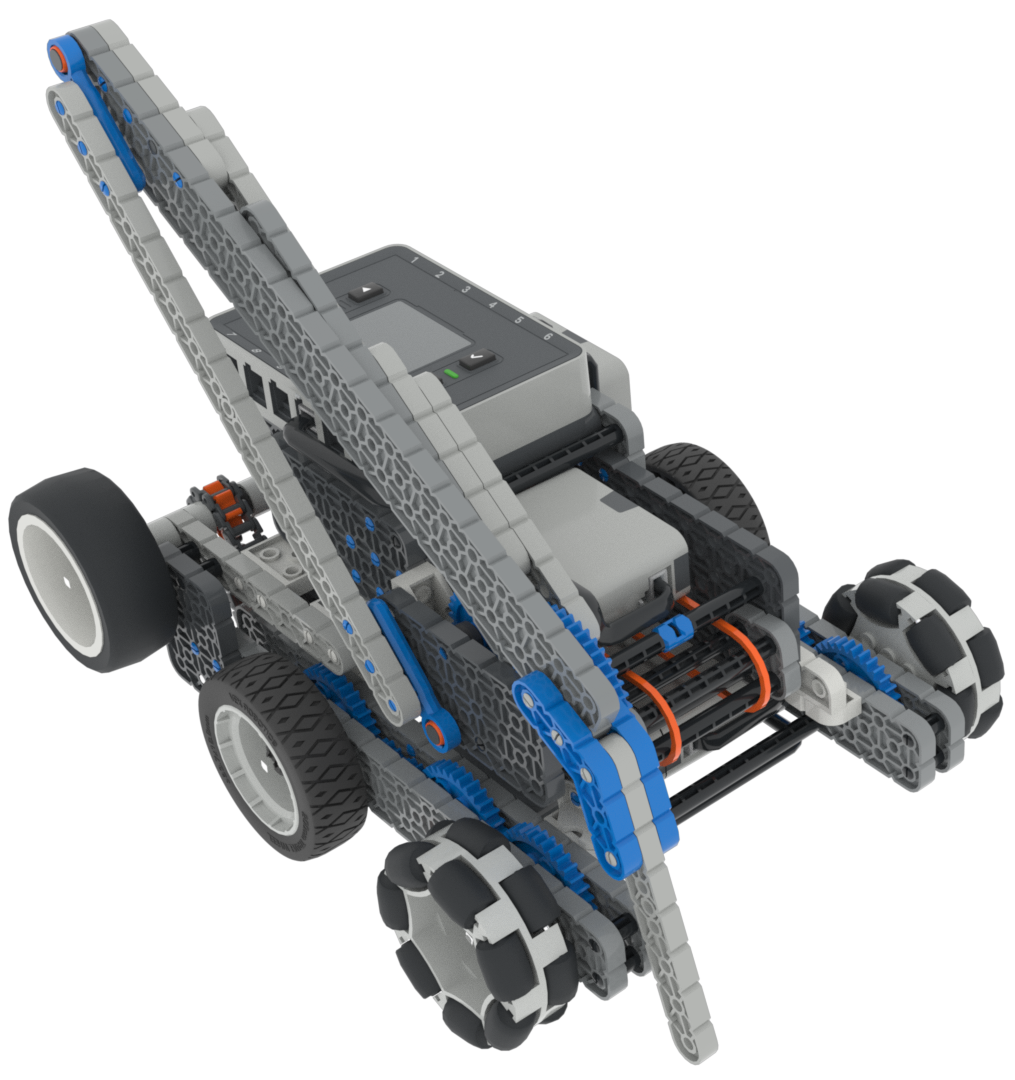
利用进料装置和传送带收集、提升和分拣积木。 |
||
|
在配备 GPS 的比赛场地中,用机械臂和推杆操控圆环。 |
||
|
在配备 GPS 的场地中,使用机械臂和进料装置移动 Triballs。 |
||
|
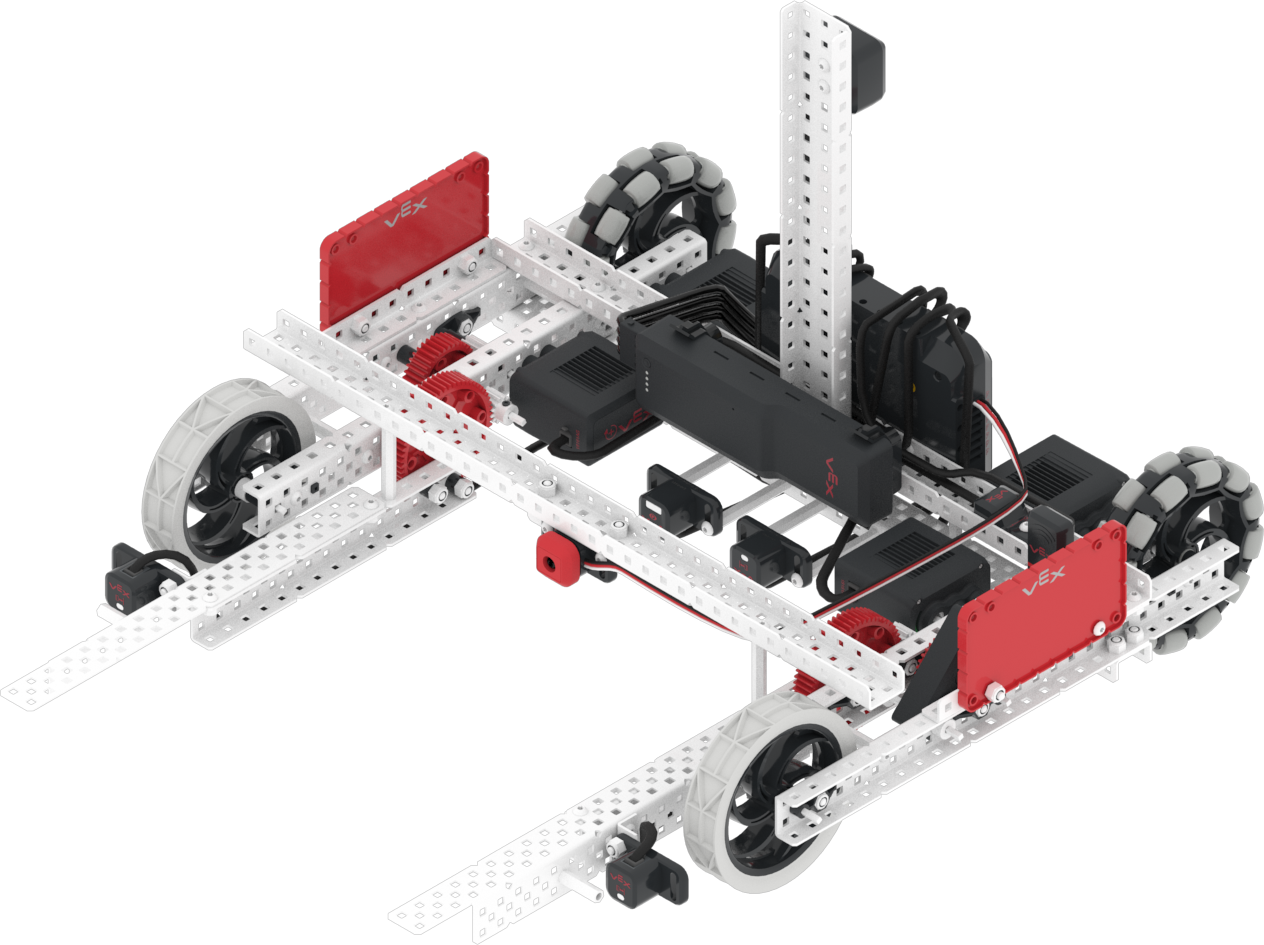
收集和评分圆盘,以及旋转滚轮。 |
||
|
举起叉子运载和得分圆环和移动球门。 |
||
|
用爪子和升降机拾取和组装销钉和梁。 |
||
|
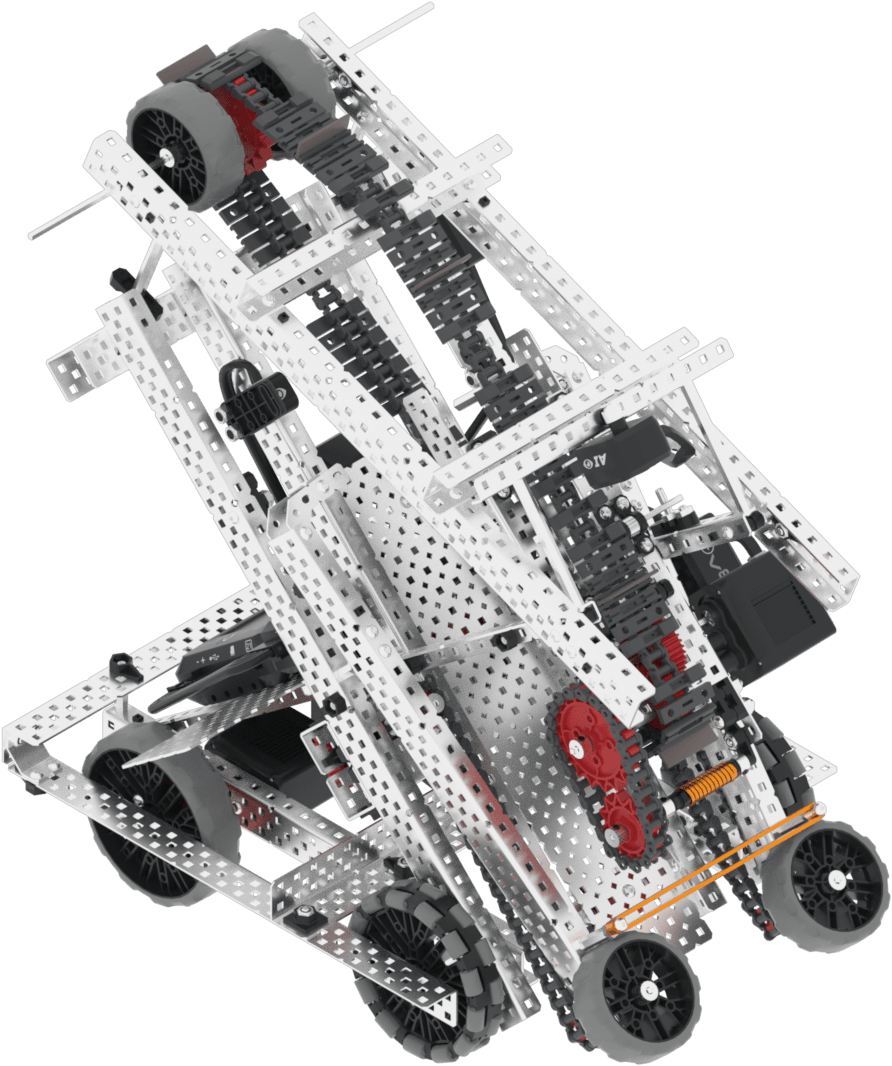
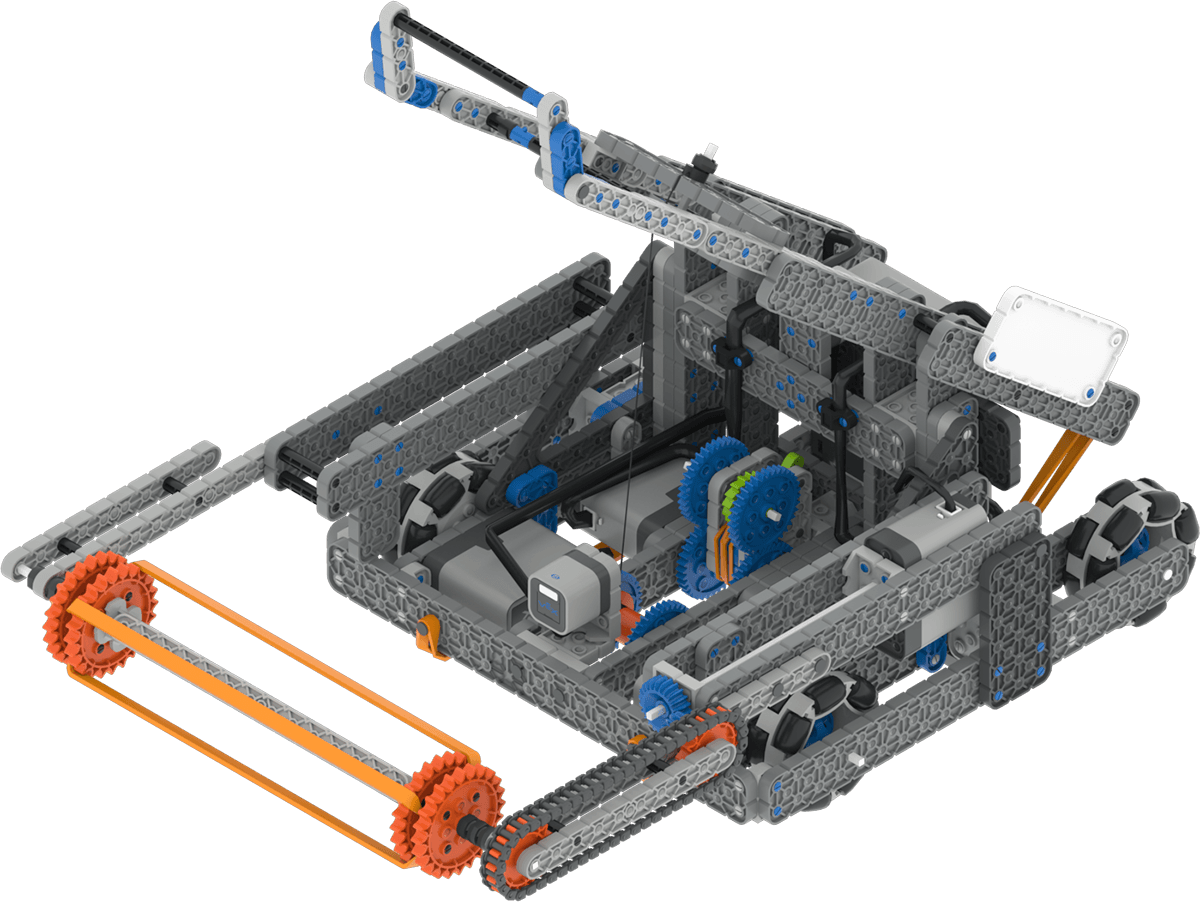
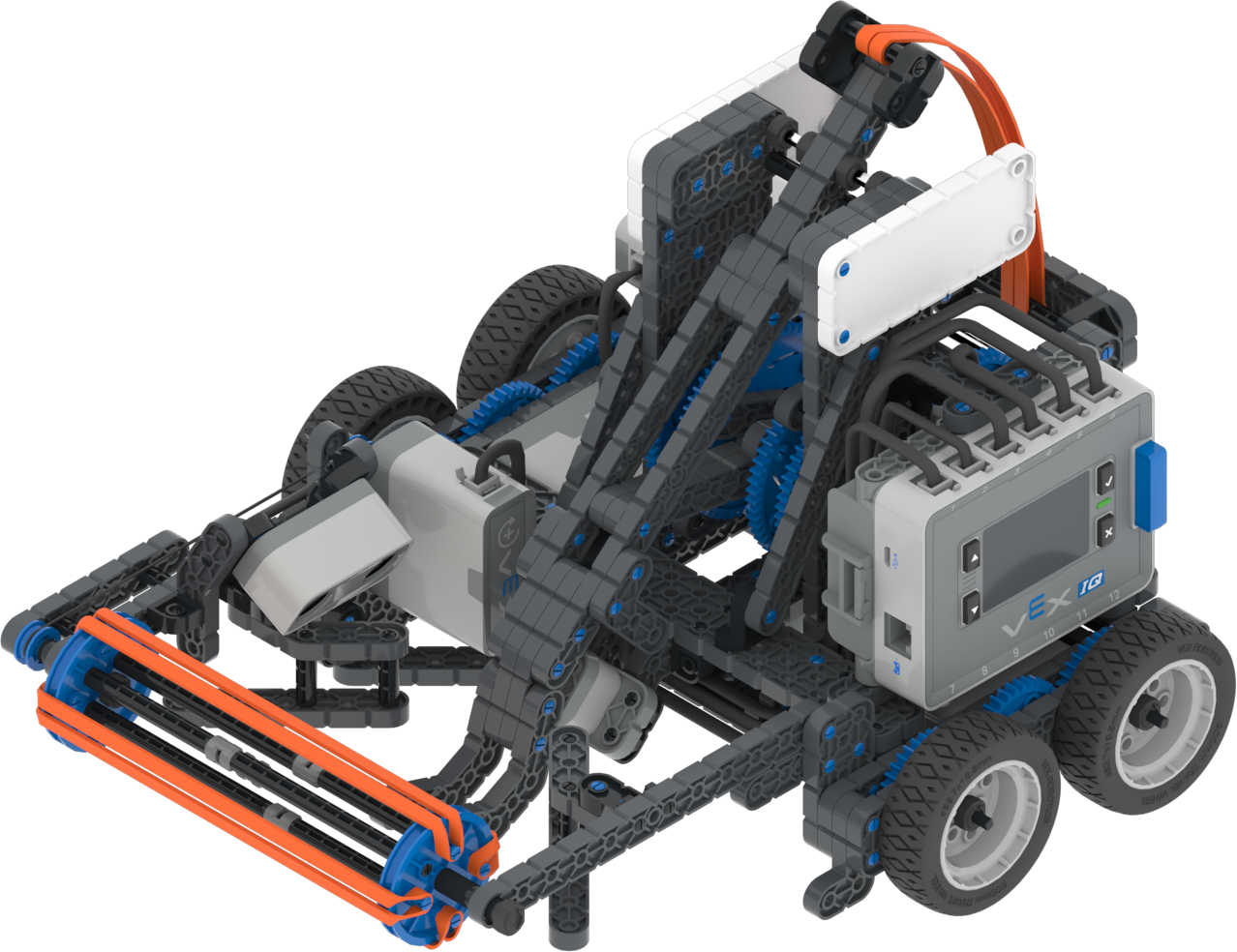
利用进料臂和弹射臂收集并发射球体。 |
||
|
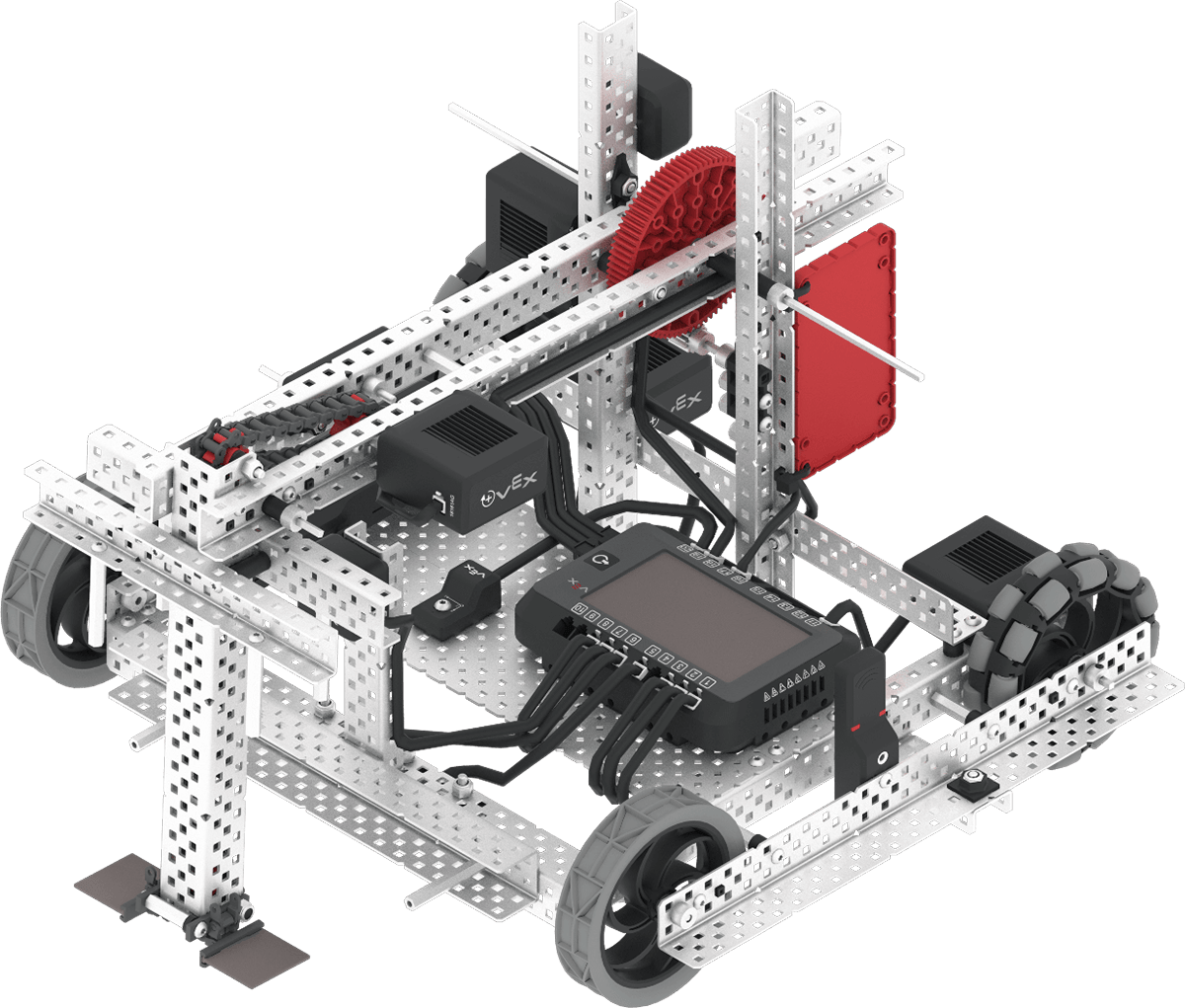
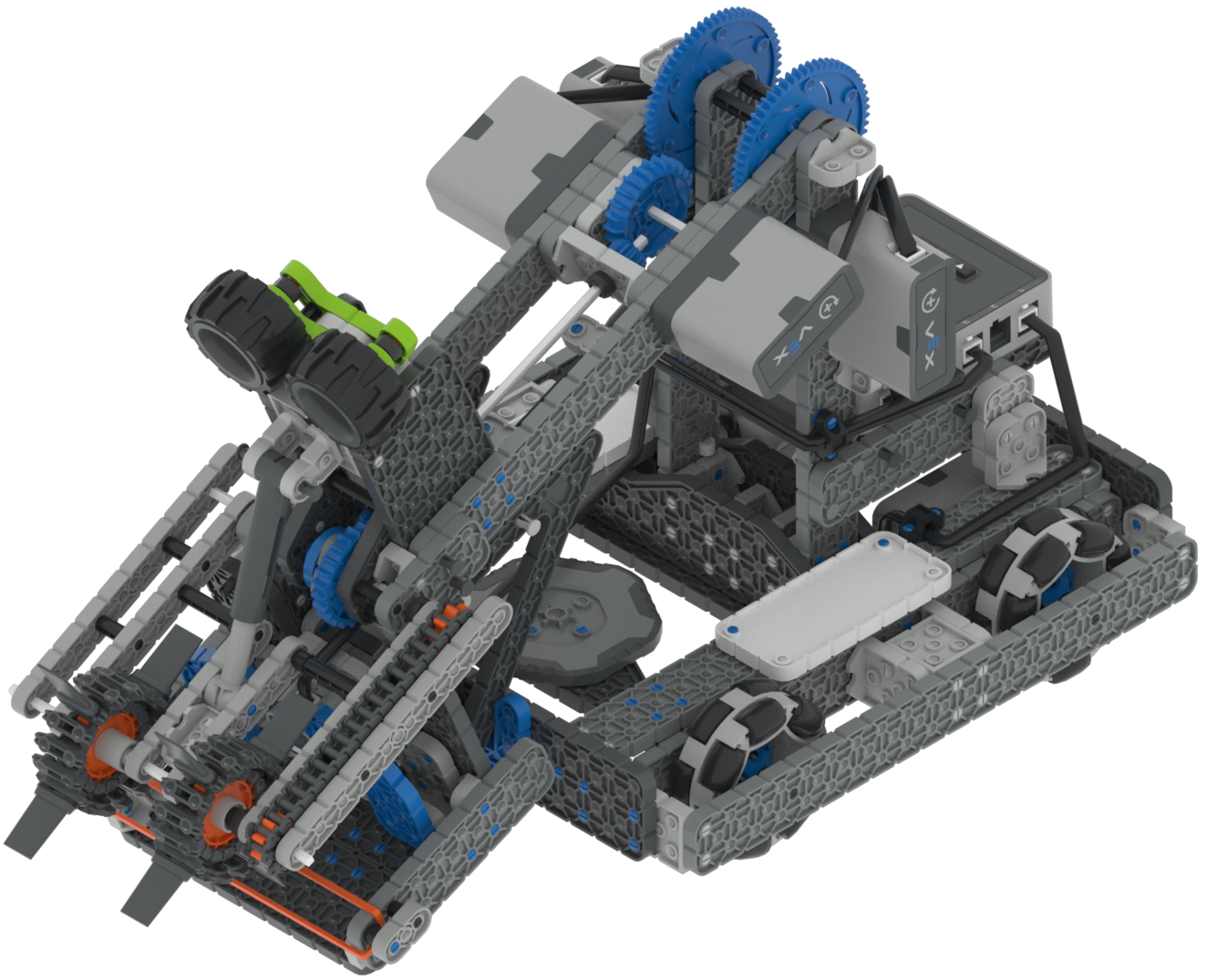
使用机械臂和进料电机组进行块体提升和移动。 |
||
|
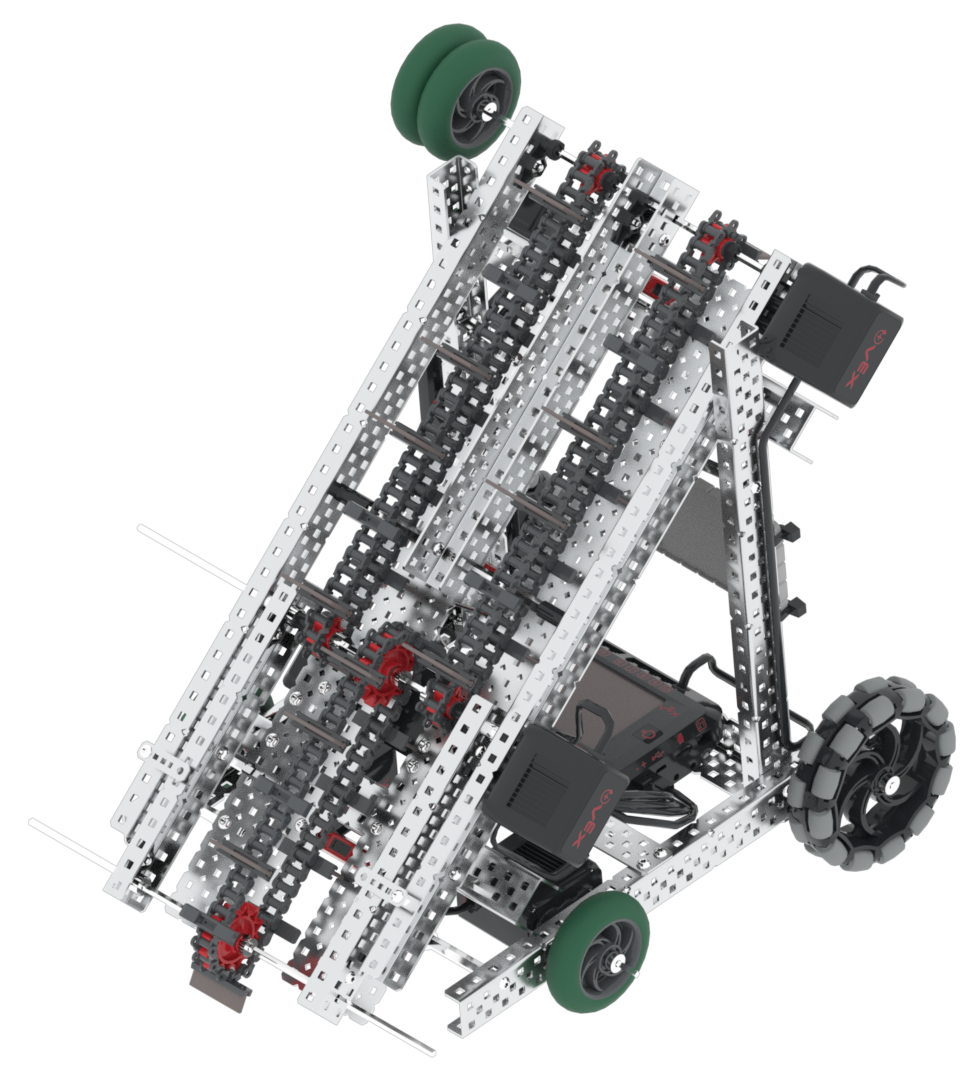
收集圆盘并使用机械臂与分配器和场地元素进行互动。 |
||
|
利用进料和弹射系统收集和发射球体。 |