标准VR机器人#
标准 VR 机器人用于所有免费游乐场和部分增强型游乐场,例如 Art Canvas+ 和 Castle Crasher+。
机器人概览#
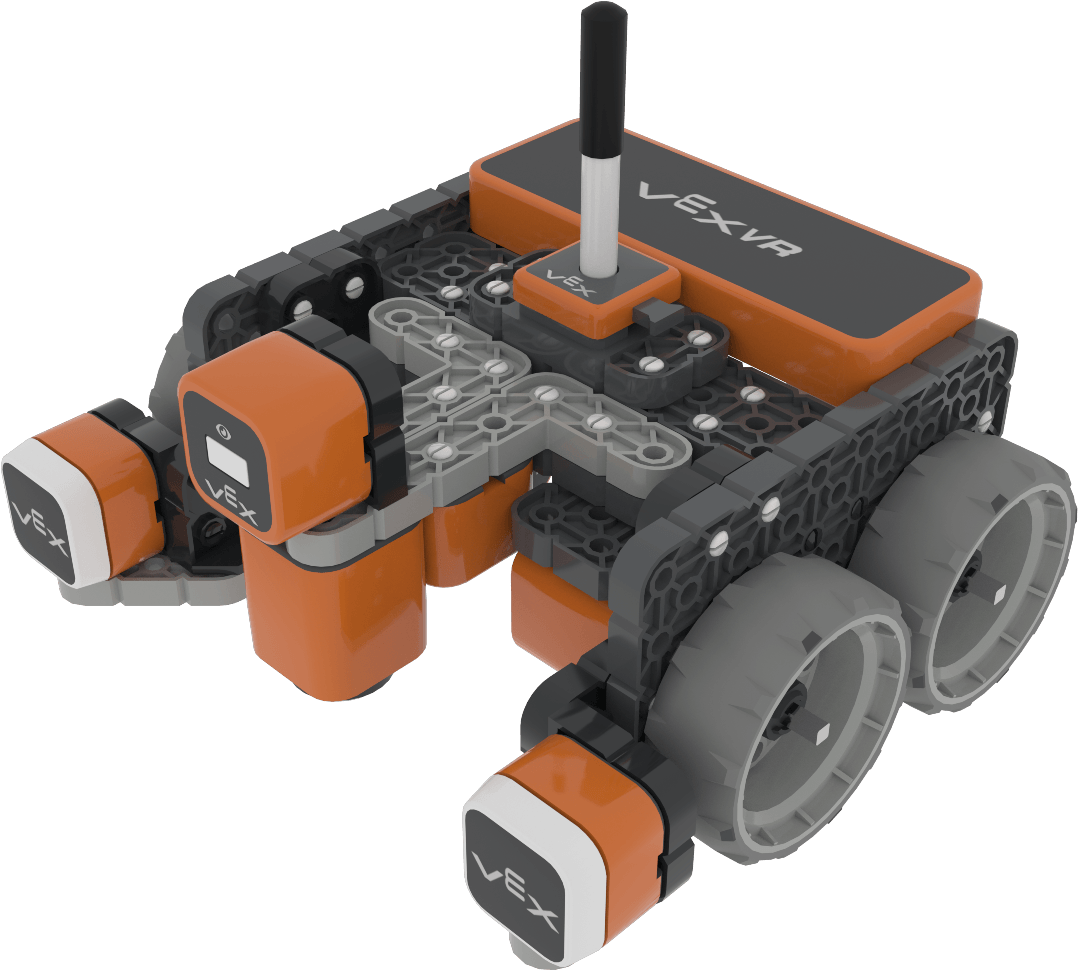
标准 VR 机器人将驱动系统运动与自由游乐场和部分增强型游乐场中使用的通用 VR 传感器和工具相结合。
组件和功能#
成分 |
使用 |
API 文档 |
|---|---|---|
传动系统 |
移动和转向机器人。 |
|
电磁铁 |
拾取和丢弃磁盘。 |
|
VR笔 |
在操场上用不同颜色的颜料作画。 |
|
脑力计时器 |
记录项目启动以来经过的时间。 |
|
保险杠传感器 |
检测机器人正面何时与物体接触。 |
|
距离传感器 |
检测机器人前端与物体之间的距离。 |
|
眼部传感器 |
检测机器人前方或下方的任何颜色。 |
|
位置传感器 |
返回机器人当前在游乐场上的位置。 |
游乐场#
下表列出了使用标准 VR 机器人的游乐场,并简要描述了游乐场的用途。
操场 |
描述 |
|---|---|
使用VR机器人的笔在地面上绘制图像。 |
|
摧毁场地上所有城堡相关的物体。 |
|
使用眼动追踪器检测并跟随彩色路径,在彩色迷宫中导航。 |
|
使用电磁铁将彩色圆盘分类到与其颜色匹配的区域。 |
|
在城堡中穿梭,用电磁铁拾取圆盘,并将它们分类到相应的颜色区域中。 |
|
拆除城堡内所有物体,布局每次项目运行时都会改变。 |
|
在每次项目运行时随机生成的迷宫中穿行。 |
|
使用眼动传感器和列表将二进制 ASCII 字符解码成隐藏信息。 |
|
练习在网格状的游乐场中操控和移动虚拟现实机器人。 |
|
使用眼动追踪器和 2D 列表,一次显示一个像素,揭示隐藏的艺术作品。 |
|
辨别操场上不同颜色的线条。 |
|
练习数数、导航和在编号为 1 到 100 的方格中移动。 |
|
使用 VR 笔在地面上描绘预先绘制的形状。 |
|
穿过迷宫到达出口。 |
|
增加了图像上传、画布下载和清除工具,适用于更高级的绘图项目。 |
|
为《城堡破坏者》增加了更多挑战关卡和通关证书。 |