V5RC 25-26 推后#
V5RC - Push Back 是 2025-2026 赛季 VEX V5 机器人竞赛 (V5RC) 的比赛项目。
要了解比赛规则,请点击此处访问比赛手册。](https://link.vex.com/docs/25-26/v5rc-pushback-manual)
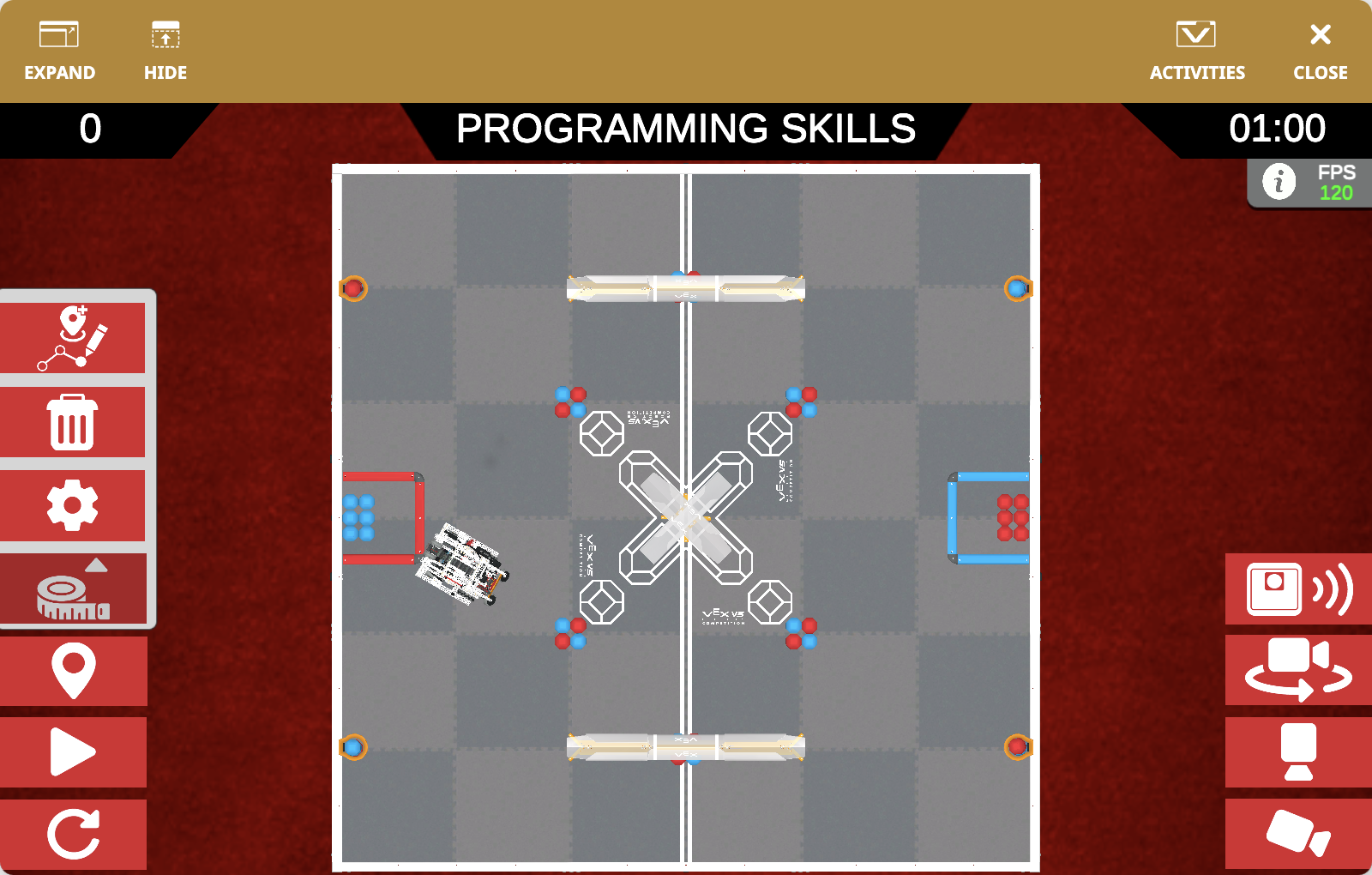
V5RC 25-26 推背式游乐场让您有机会在本赛季的编程技能挑战赛中获得最高分。
领域概述#
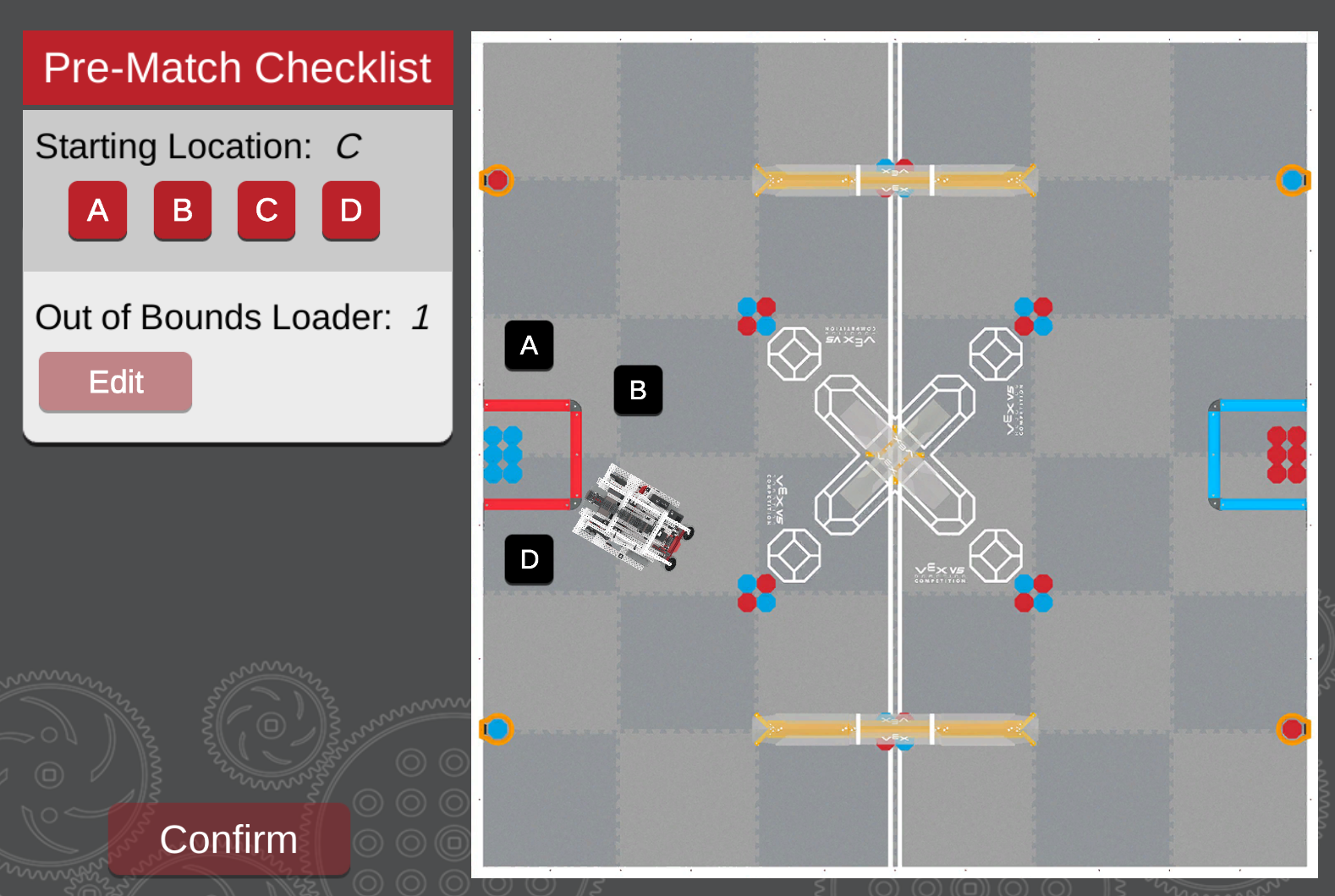
游乐场有四个不同的起始位置,可以使用游乐场的赛前检查清单进行设置,该清单会在您第一次打开游乐场时出现。
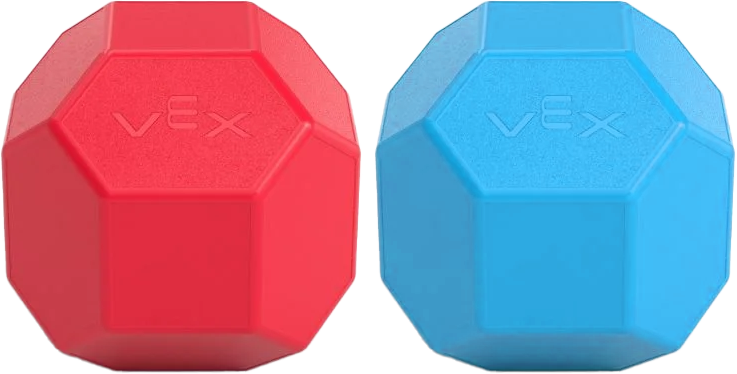
操场上有红色和蓝色的积木,将它们推入操场上的球门即可得分。
该场地还使用 GPS 场地代码来利用机器人的GPS 传感器。请前往GPS 坐标查看场地上重要地点或物体的坐标。
机器人概览#
V5RC 25-26 推背游乐场使用 VEX V5 英雄机器人,Dex。
GPS坐标#
GPS(游戏定位系统)传感器提供(X,Y)坐标和航向,用于在 V5RC 25-26 推背式游乐场中进行导航,使用 GPS 场代码来确定位置。
GPS 传感器从机器人的精确中心进行测量,测量场的中心定义为 (0, 0)。
游戏元素的(X,Y)坐标#
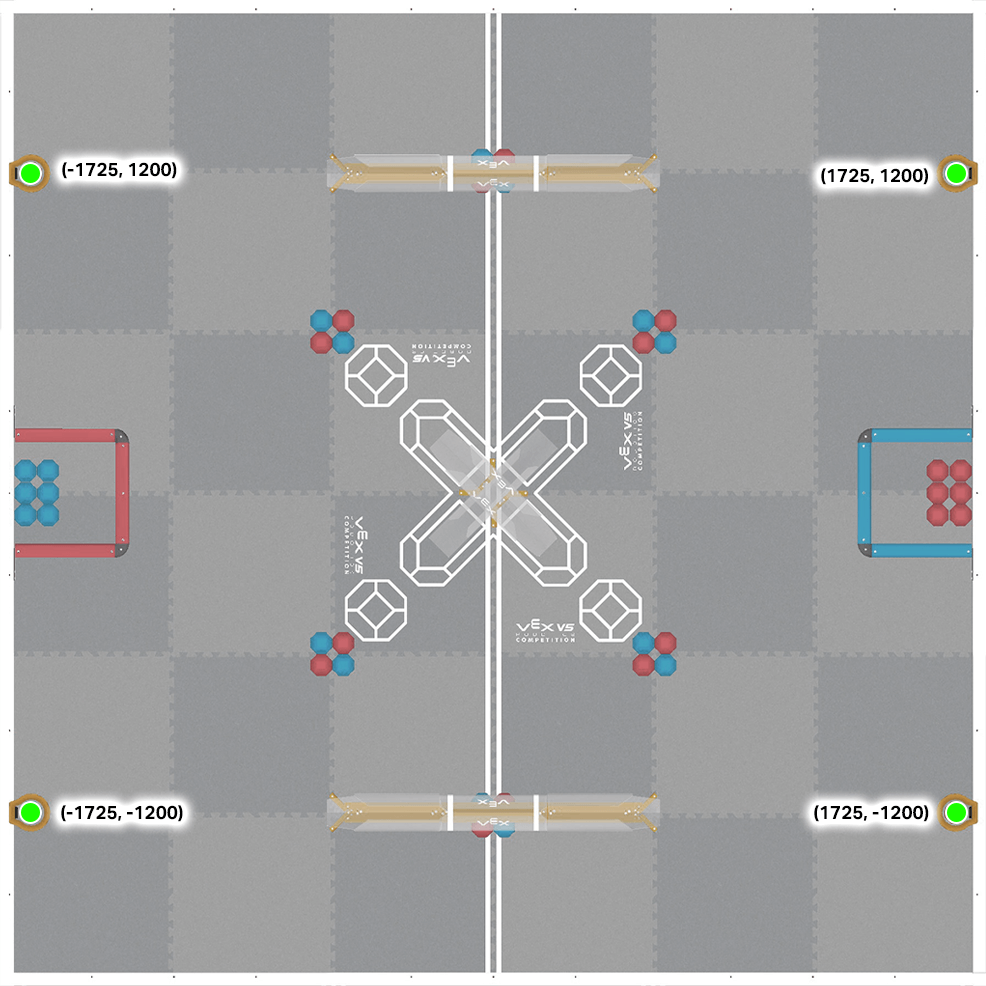
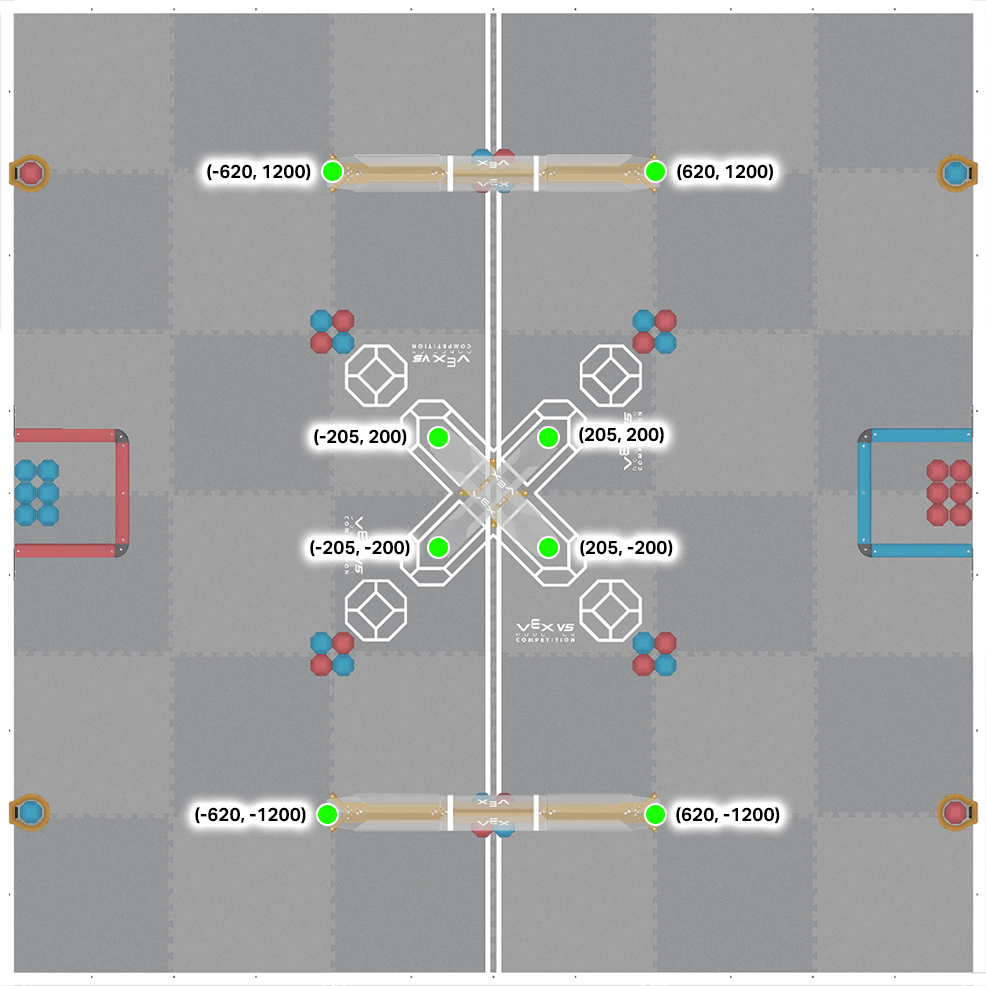
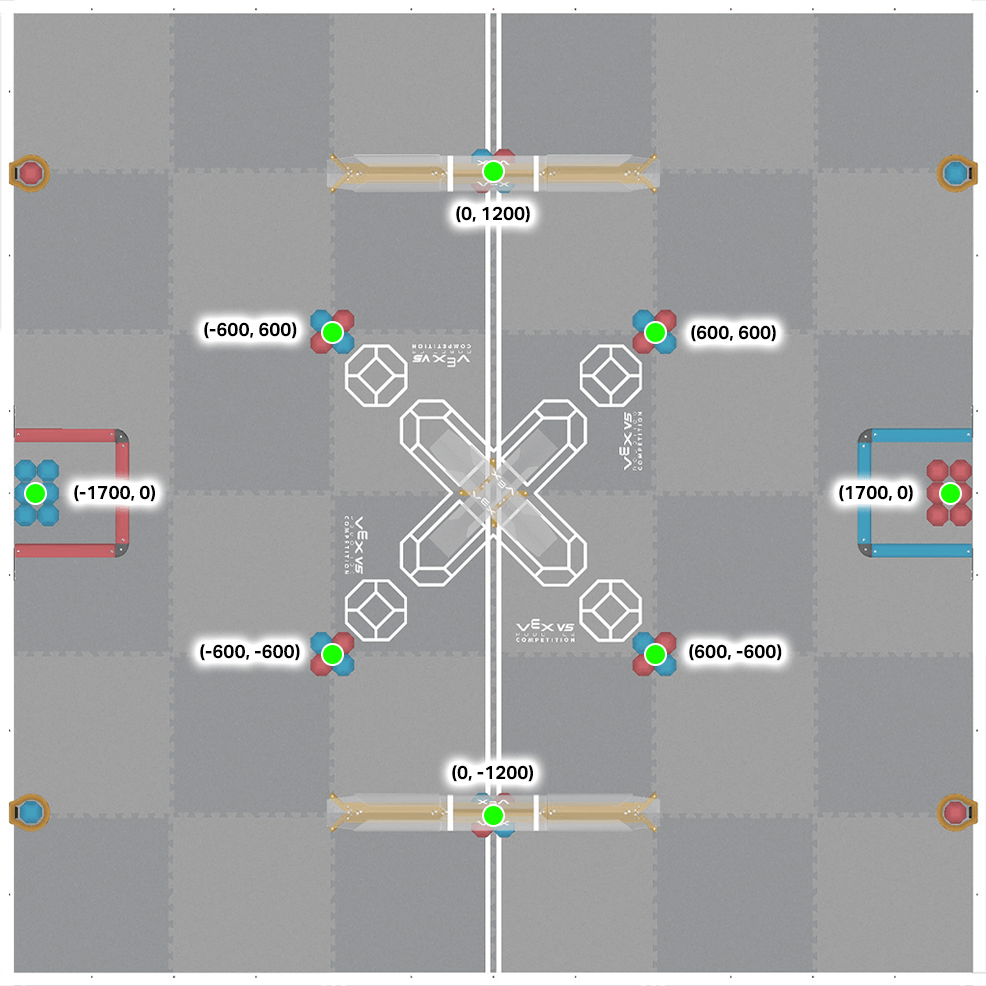
以下图片显示了场地的俯视图,并标出了重要比赛元素的 GPS 坐标。
目标#
进球入口:
长期目标:
(-620,1200)
(620,1200)
(-620,-1200)
(620,-1200)
中心目标:
(-205,200)
(-205,-200)
(205,200)
(205,-200)
积木#
块集群:
最左侧(仅限蓝色 6):(-1700,0)
最右边(仅限 6 个红色):(1700,0)
混合装(2个红色,2个蓝色):
(-600,-600)
(-600,600)
(600,600)
(600,-600)
(0,1200)
(0,-1200)
装载机#
装载机位置:
(-1725,1200)
(-1725,-1200)
(1725,1200)
(1725,-1200)