V5 后推(Dex)#
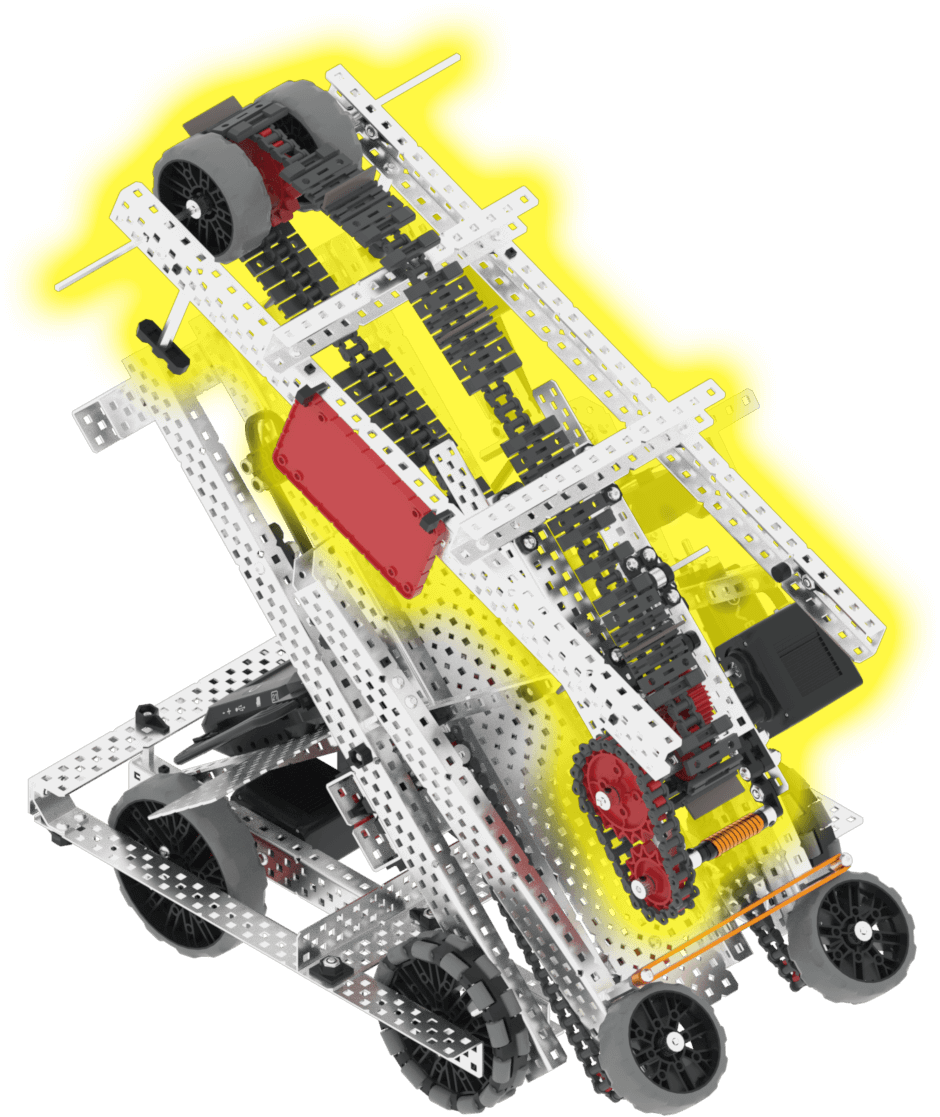
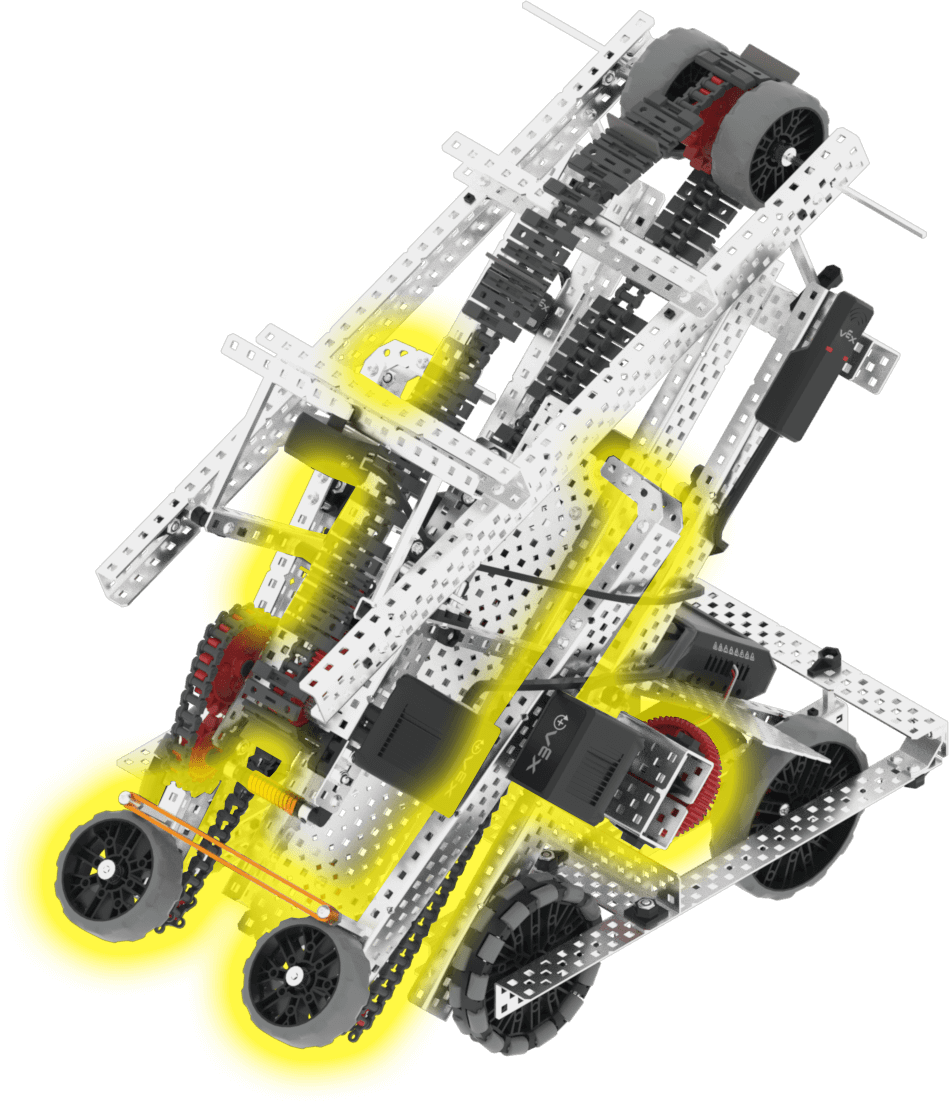
Dex 是 VEX V5 Hero Bot,用于 V5RC 25-26 Push Back Playground。
机器人概览#
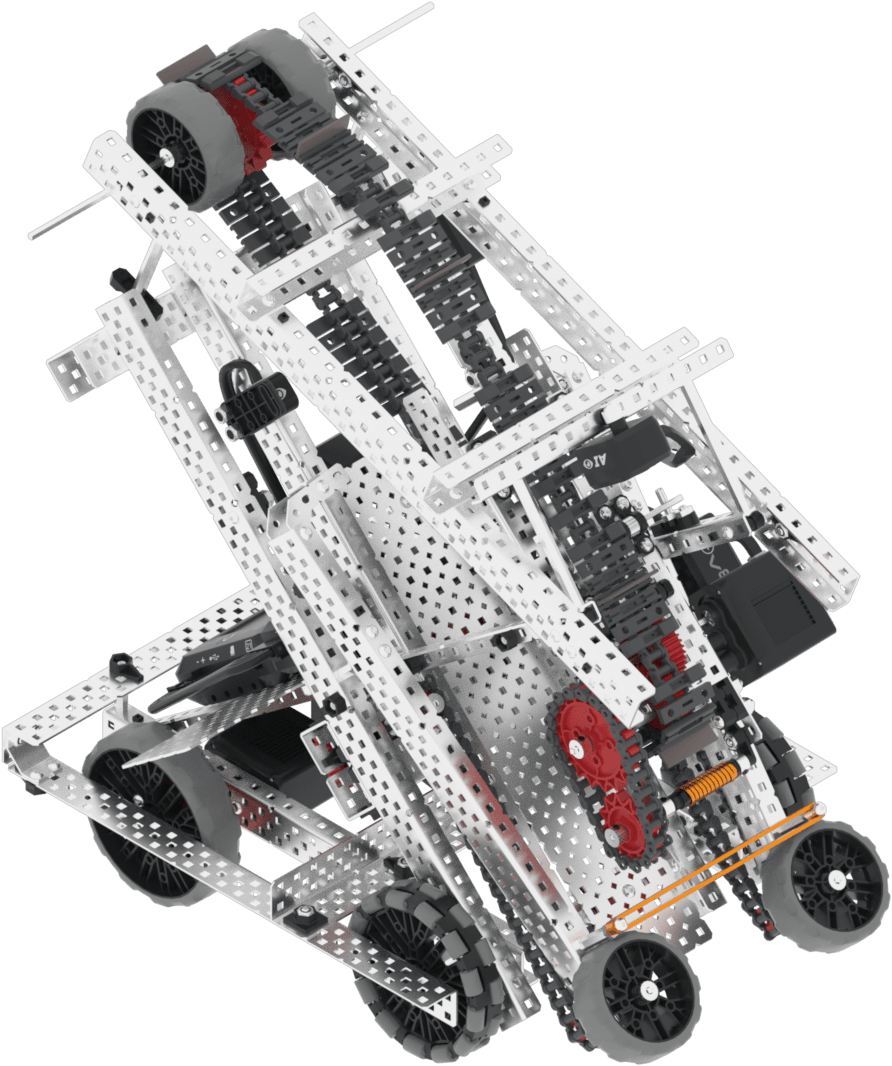
Dex 支持标准 VR 控制和传感器,例如惯性传感器和脑计时器,其他 Dex 特有的功能在 机器人专用模块 和 机器人专用 Python 中有所介绍。
电机#
配置和 |
描述 |
|---|---|
|
The conveyor motor moves Blocks from the intake up to the top of the robot so the Block can be pushed into a goal. |
|
The intake motor rotates the two wheels at the front of the robot. This allows Blocks to be picked up off the ground. |
组件和功能#
组件或功能 |
使用 |
API 文档 |
|---|---|---|
传动系统 |
移动和转向机器人。 |
|
传送电机 |
将积木从进料口移到机器人顶部,以便将积木推入目标位置。 |
|
进气马达 |
旋转机器人前部的两个轮子。这样就可以从地面上拾取积木。 |
|
AI视觉传感器 |
检测游戏对象,使机器人能够自主调整方向。 |
|
保险杠开关 |
检测模块何时通过进料口并进入传送带。 |
|
距离传感器 |
检测机器人前端与物体之间的距离。 |
|
光学传感器 |
检测传送带顶部方块的颜色。 |
|
GPS传感器 |
返回机器人当前在游乐场上的位置和方向。 |
|
脑力计时器 |
记录项目启动以来经过的时间。 |
游乐场#
操场 |
描述 |
|---|---|
在 V5RC 25-26 虚拟技能场中,将红色和蓝色方块推入目标。 |