机器人专用积木#
所有标准 VEXcode VR 模块均可用于VIQRC 虚拟技能 - 快速接力游乐场。
运动#
这个游乐场的积木将可以访问所有运动积木的进气电机和弹射器组参数。
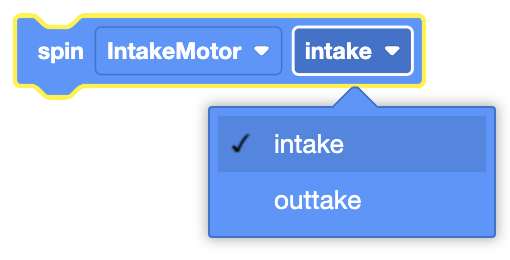
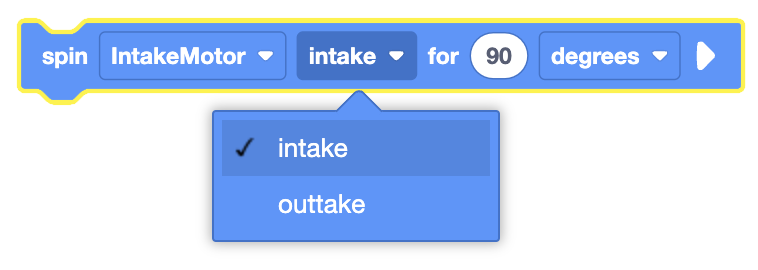
当为运动块选择方向时,intake 将使进气电机正向旋转,而 outtake 将使进气电机反向旋转。
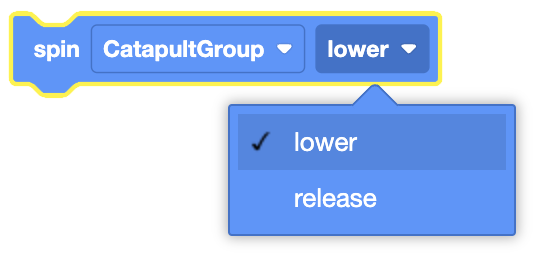
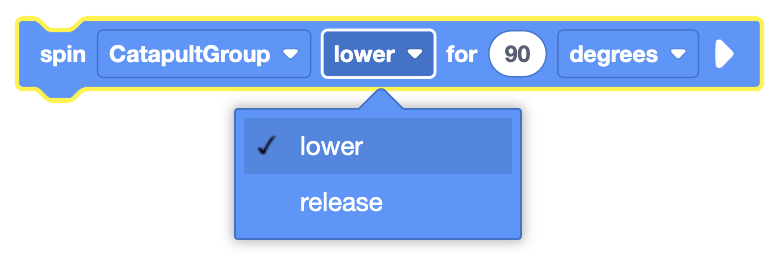
对于弹射器组,降低将使弹射器组向前旋转,释放将使弹射器组反向旋转。
Spin#
Spin 块用于无限旋转电机。
这是一个非等待块,允许任何后续块无延迟地执行。
[IntakeMotor v] [收集器 v] 转
选择要使用的电机。
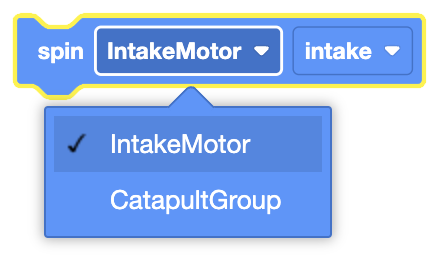
选择电机移动的方向。
进气电机可以朝进气或出气方向旋转。
弹射器组可以朝降低或释放方向旋转。
在这个例子中,弹射器将发射预装的球,然后降低弹射器以准备发射新的球。
当开始
[Launch the preloaded Ball.]
[CatapultGroup v] [释放 v] 转
[Lower the Catapult to load a new Ball.]
[CatapultGroup v] [更低 v] 转
Spin for#
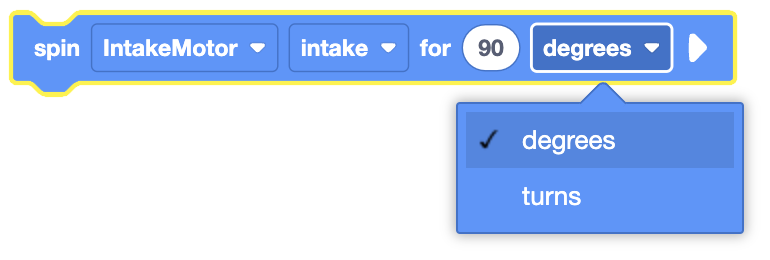
Spin for 块用于使电机旋转给定的距离。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
[IntakeMotor v] [收集器 v] 转 [90] [度 v] ▶
选择要使用的电机。
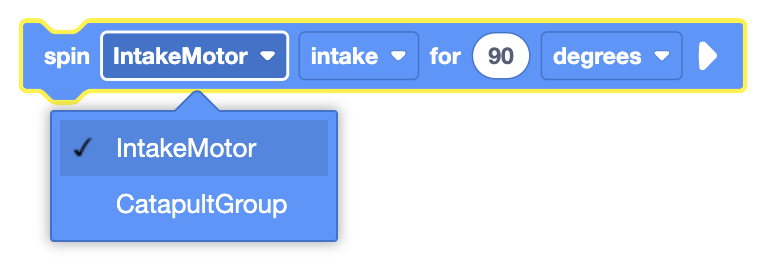
选择电机移动的方向。
进气电机可以朝进气或出气方向旋转。
弹射器组可以朝降低或释放方向旋转。
通过输入一个值并选择测量单位(度或圈)来设置电机旋转的距离。
默认情况下,旋转块会阻止任何后续块的执行,直到其完成为止。通过展开旋转块以显示不等待,块将在电机转动时继续执行。
[IntakeMotor v] [收集器 v] 转 [90] [度 v] ◀ 并且不等待
在这个例子中,弹射器将发射预装的球,然后降低弹射器以准备发射新的球。
当开始
[Launch the preloaded Ball.]
[CatapultGroup v] [释放 v] 转
[Lower the Catapult to load a new Ball.]
[CatapultGroup v] [更低 v] 转 [1350] [度 v] ▶
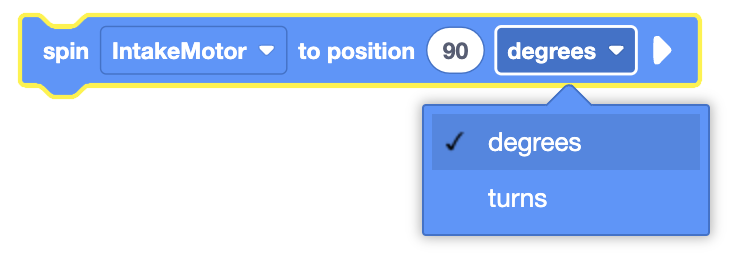
Spin to position#
旋转到位置块用于将电机旋转到设定位置。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
[IntakeMotor v] 转至 [90] [度 v] ▶
选择要使用的电机。
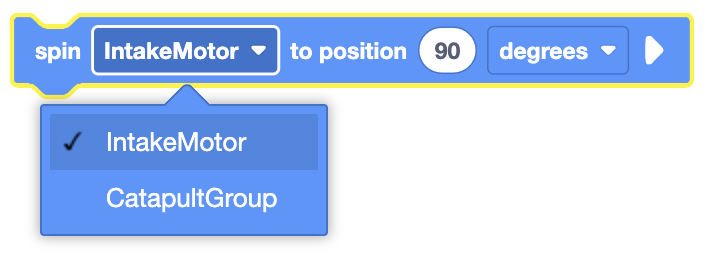
通过输入一个值并选择测量单位(度或圈)来设置电机旋转的距离。
默认情况下,旋转到指定位置积木会阻止所有后续积木的执行,直到其完成。通过展开旋转到指定位置积木以显示不等待,积木将在电机移动时继续执行。
[IntakeMotor v] 转至 [90] [度 v] ◀ 并且不等待
在这个例子中,弹射器将发射预装的球,然后降低弹射器以准备发射新的球。
当开始
[Launch the preloaded Ball.]
[CatapultGroup v] [释放 v] 转
[Lower the Catapult to load a new Ball.]
[CatapultGroup v] 转至 [1260] [度 v] ▶
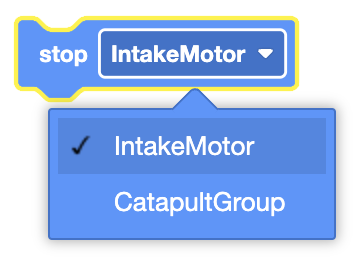
Stop Motor#
停止电机块用于停止电机移动。
这是一个非等待块,允许任何后续块无延迟地执行。
[IntakeMotor v] 停止
选择要使用的电机。
在此示例中,进气电机将旋转 1 秒钟以拾取球,然后停止。
当开始
[Start spinning Intake Motor to prepare to pick up a Ball.]
[IntakeMotor v] [收集器 v] 转
等待 (1) 秒
[After the Ball is picked up, stop spinning the Intake Motor.]
[IntakeMotor v] 停止
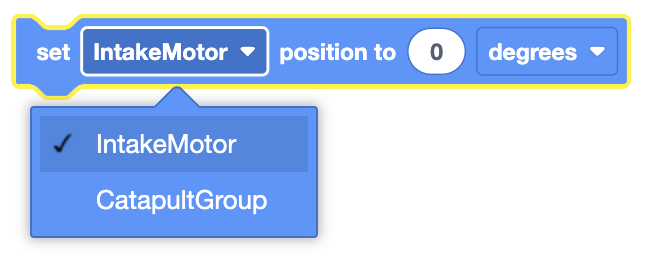
Set Motor position#
设置电机位置块用于将电机的编码器位置设置为输入的值。
这是一个非等待块,允许任何后续块无延迟地执行。
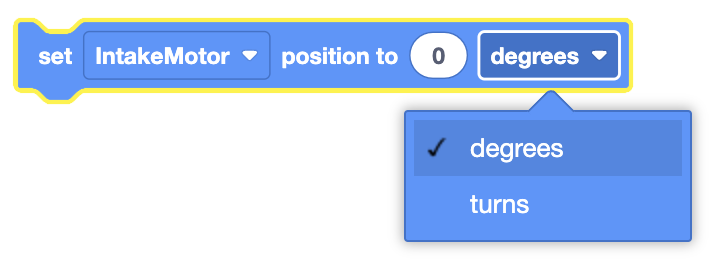
设定 [IntakeMotor v] 转位至 [0] [度 v]
选择要使用的电机。
设置要使用的测量单位,度或圈。
在此示例中,降低的弹射臂被设置为新的 0 度位置。
当开始
[release the preloaded Ball.]
[CatapultGroup v] [释放 v] 转
[Lower the Catapult Arm to prepare for the next Ball.]
[CatapultGroup v] 转至 [1260] [度 v] ▶
[Make the lowered Catapult Arm position the new 0 degrees position.]
设定 [CatapultGroup v] 转位至 [0] [度 v]
Set Motor velocity#
设置电机速度块用于设置电机的速度。
这是一个非等待块,允许任何后续块无延迟地执行。
设定 [IntakeMotor v] 转速为 [50] [% v]
选择要使用的电机。
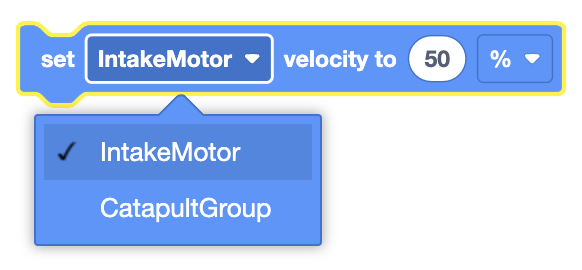
设置电机速度块将接受-100%到100%的范围。
在此示例中,进气电机的速度在进气电机开始旋转以拾取球之前设置为 100%。
当开始
[Start spinning the Intake Motor to prepare to pick up Balls.]
设定 [IntakeMotor v] 转速为 [100] [% v]
[IntakeMotor v] [收集器 v] 转
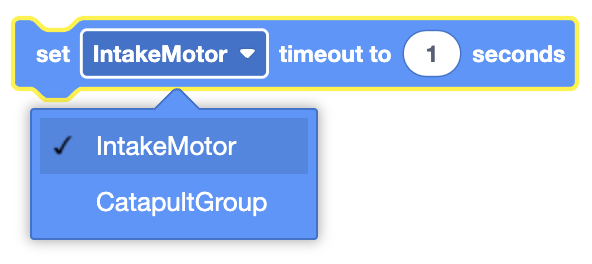
Set Motor timeout#
设置电机超时块用于设置电机运动块的时间限制。
这可以防止未到达预定位置的运动块阻止后续块的运行。
这是一个非等待命令,允许任何后续命令无延迟地执行。
设定 [IntakeMotor v] 超时为 [1] 秒
选择要使用的电机。
在此示例中,弹射器组的超时时间设置为 2 秒,然后才开始降低弹射臂。
当开始
设定 [CatapultGroup v] 超时为 [2] 秒
[Lower Catapult Arm to prepare to pick up a Ball.]
[CatapultGroup v] [更低 v] 转 [10] [转 v] ▶
传感#
Swish has access to the standard Timer, Drivetrain, and Distance Sensing Blocks.
Eye Sensing has been renamed to Optical Sensing to match the Rear Optical Sensor.
Swish 可以使用电机传感块:
Motor is done#
电机已完成块用于报告所选电机或电机组是否已完成其运动。
<[IntakeMotor v] 已结束?>
选择要使用的电机或电机组。
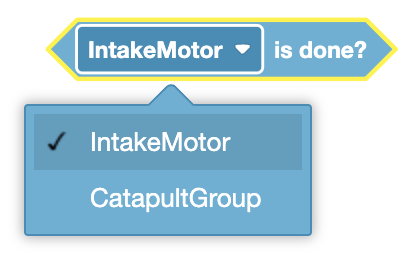
The Motor is done block reports True when the selected Motor or Motor Group has completed its movement.
The Motor is done block reports False when the selected Motor or Motor Group has not completed its movement.
电机已完成块用于具有六边形(六面)空间的块中。
Motor is spinning#
电机正在旋转块用于报告所选电机或电机组是否正在移动。
<[IntakeMotor v] 正在转?>
选择要使用的电机或电机组。
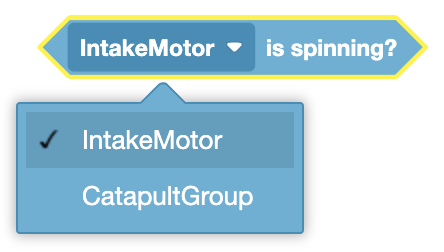
The Motor is spinning block reports True when the selected Motor or Motor Group is moving.
The Motor is spinning block reports False when the selected Motor or Motor Group is not moving.
马达正在旋转块用于具有六边形(六面)空间的块中。
Position of motor#
电机位置块用于报告电机或电机组中第一个电机的位置。
([IntakeMotor v] 转位 [度 v])
选择要使用的电机或电机组。
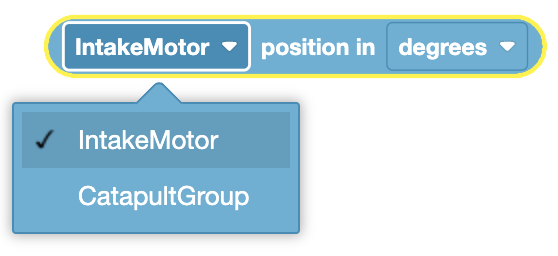
选择使用的单位,度或圈。
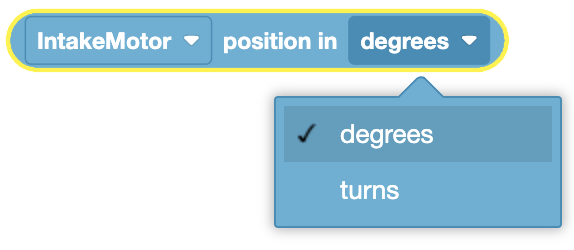
电机位置块用于具有圆形空间的块中。
在此示例中,弹射臂将降低,直到其电机位置大于 1260 度。
当开始
[Release the preloaded Ball.]
[CatapultGroup v] [释放 v] 转
[Lower the Catapult Arm to prepare for the next Ball.]
[CatapultGroup v] [更低 v] 转
等到 <[1260] [math_less_than v] ([CatapultGroup v] 转位 [度 v])>
[CatapultGroup v] 停止
Velocity of motor#
电机速度块用于报告电机或电机组中第一个电机的当前速度。
([IntakeMotor v] 速度 [度 v] 值 :: custom-motion)
选择要使用的电机或电机组。
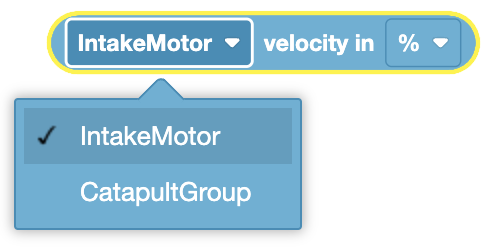
电机速度块用于具有圆形空间的块中。