机器人详细信息#
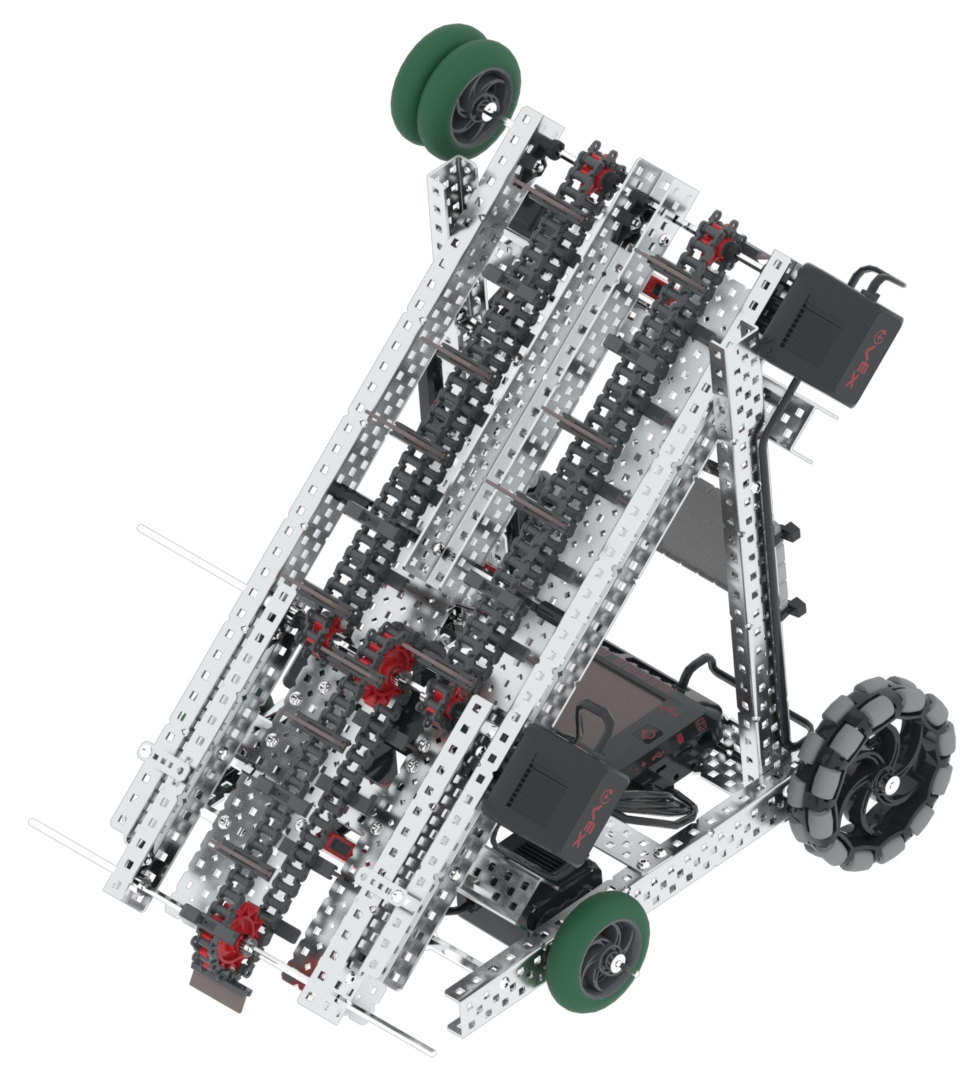
V5RC 虚拟技能 - 旋转 游乐场使用标准 VEX V5 英雄机器人,Disco。
Disco VEX V5 Hero Bot 长约 350 毫米,宽约 280 毫米。
汽车集团#
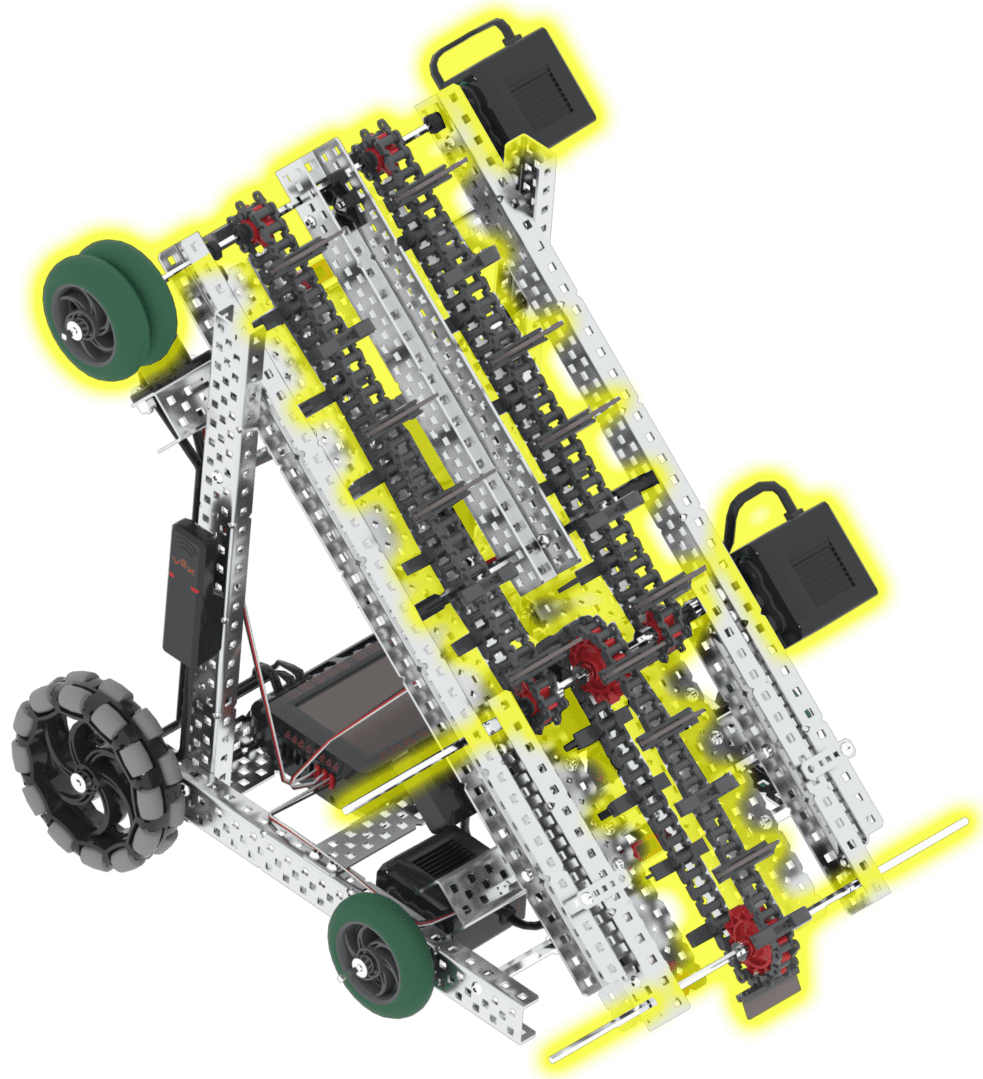
Disco 为其臂和进气口配备了两套电机组。
配置 & |
描述 |
API 文档 |
|---|---|---|
|
这使得机器人能够收集和评分光盘。进气口顶部有两个轮子。它们可以用来旋转滚轮。当轮子接触滚轮时,通过旋转进气电机组,滚轮就会旋转并改变颜色。 |
传感器#
Disco 可以访问以下传感器进行自主编码:
配置 |
描述 |
API 文档 |
Python 命令名称 |
|---|---|---|---|
大脑计时器 |
机器人可以使用内置计时器。 |
|
|
传动系统 |
机器人可以使用带有内置惯性传感器的传动系统来跟踪机器人的当前航向和旋转角度。 |
|
|
底部距离 |
报告物体是否靠近传感器,以及从传感器前部到物体的大致距离(以毫米或英寸为单位)。 |
|
|
线路追踪器 |
位于 Disco 进气口底部。它们可用于检测进气口内光盘的位置,并确定进气口中当前容纳的光盘数量。 |
||
滚轮光学 |
报告物体是否靠近传感器,如果是,则报告该物体的颜色。 |
|
|
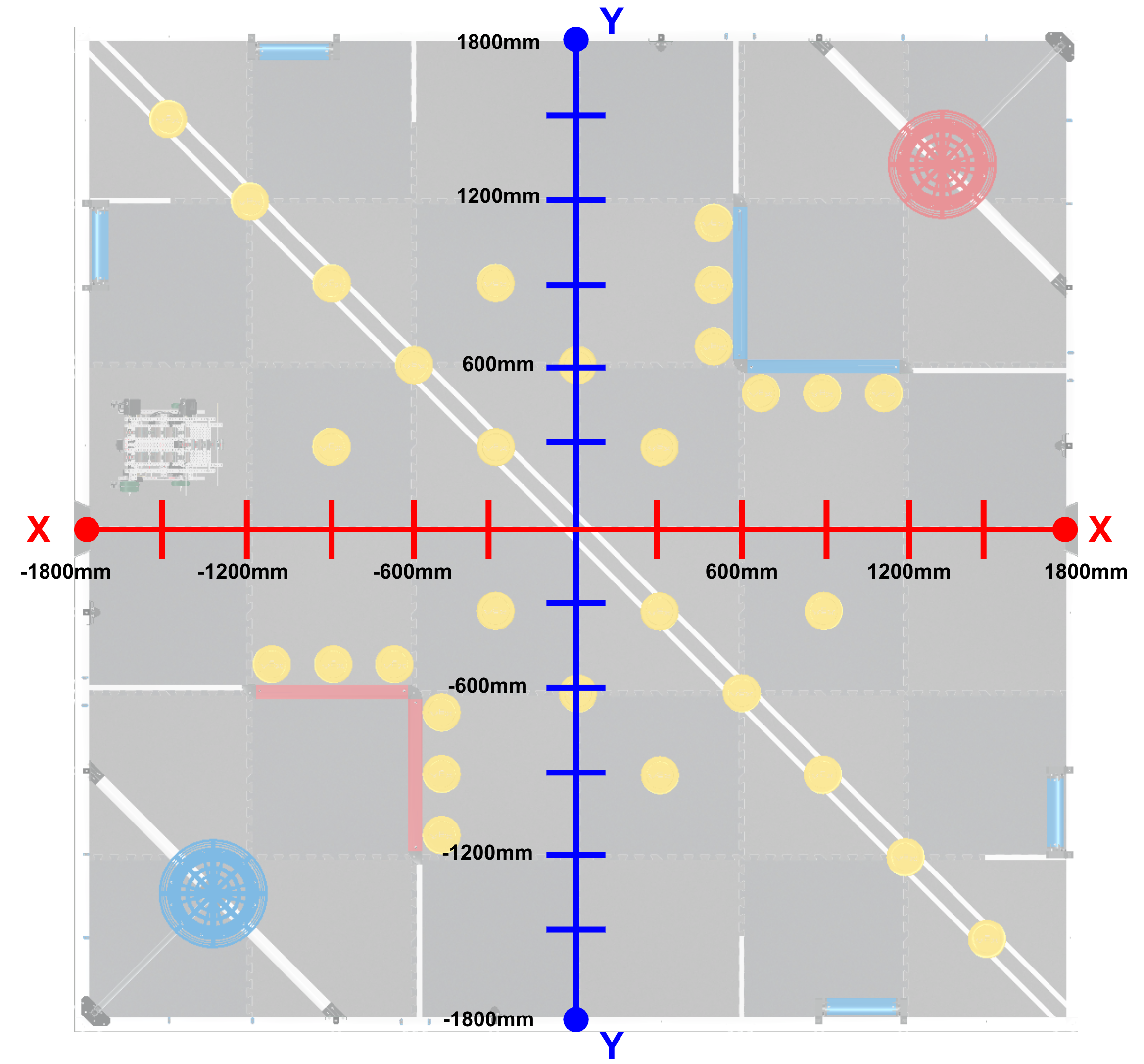
全球定位系统 |
报告 Striker 旋转中心的当前 X 和 Y 位置(以毫米或英寸为单位)。GPS 传感器还可以报告当前航向(以度为单位)。 |
|
GPS 传感器依靠笛卡尔坐标系进行导航,其中场的中间为 (0, 0)。