机器人详细信息#
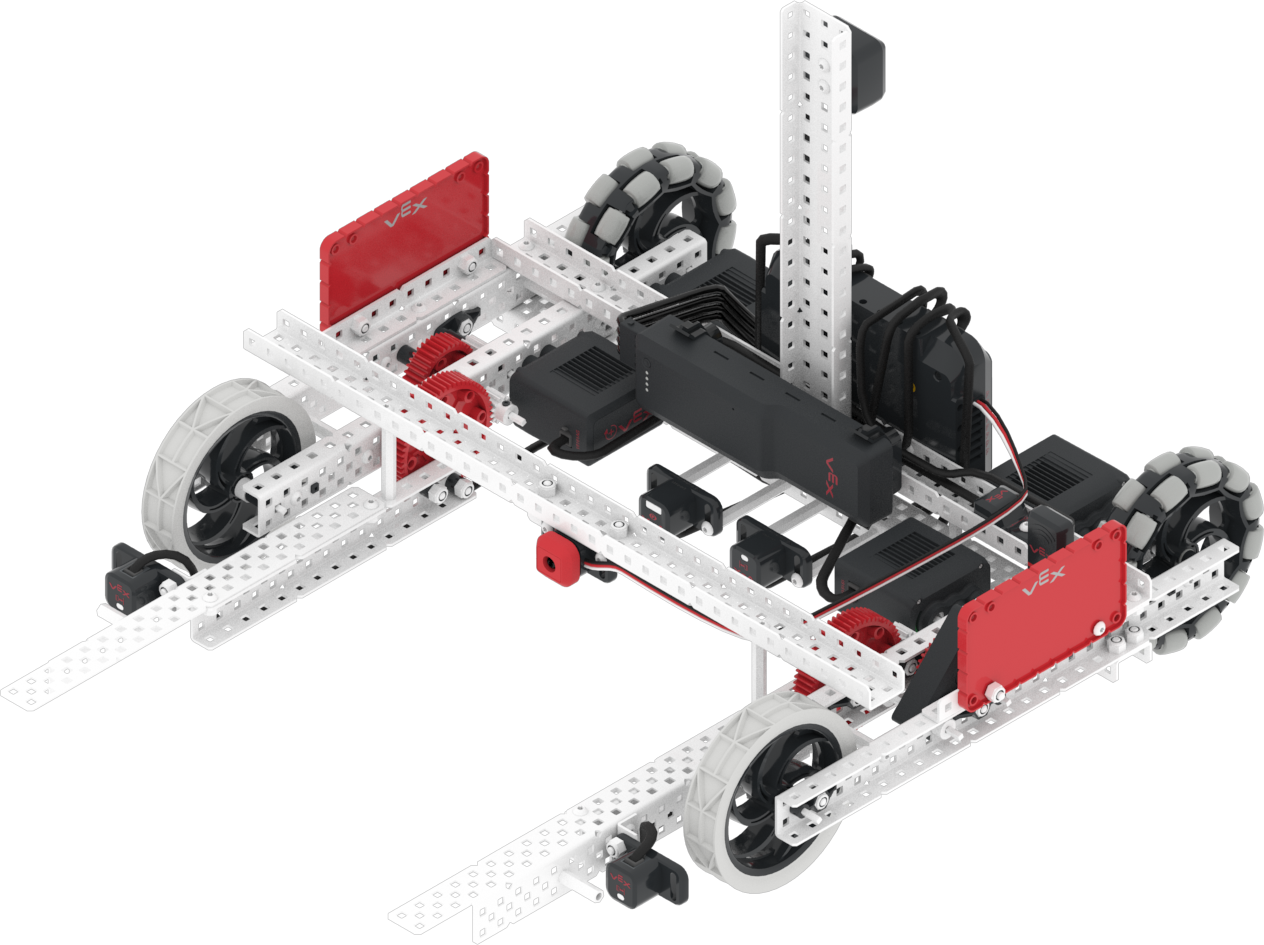
V5RC 虚拟技能 - 引爆点 游乐场使用标准 VEX V5 英雄机器人 Moby。
Moby VEX V5 Hero Bot 长约 350 毫米,宽约 280 毫米。
汽车集团#
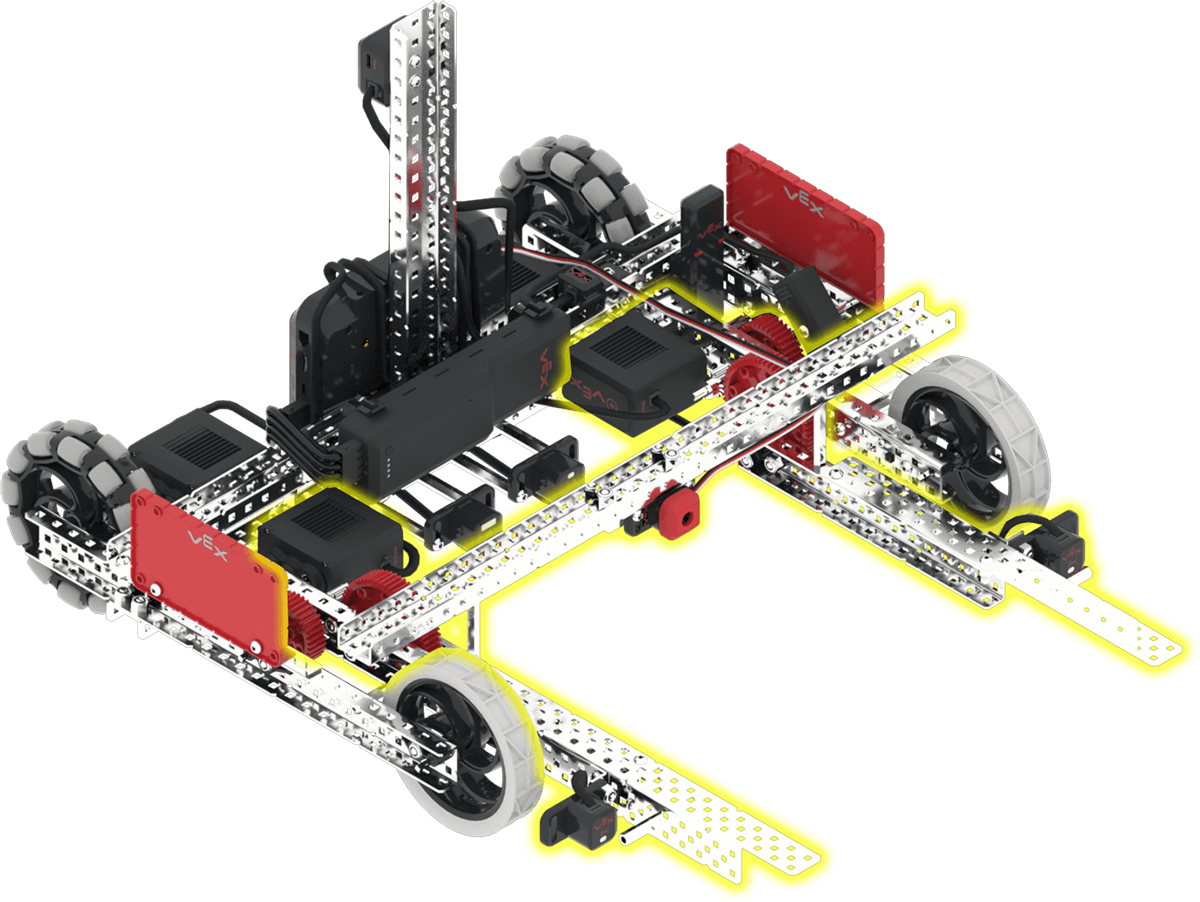
Moby 为其叉车配备了一个电机组。
配置 & |
描述 |
API 文档 |
|---|---|---|
|
叉车可以升降。这使得机器人能够运输并得分环和移动球门。叉车电机组的默认位置为 0 度,在 1700 度时将向地面下降。 |
传感器#
Moby 可以访问以下传感器进行自主编码:
配置 |
描述 |
API 文档 |
Python 命令名称 |
|---|---|---|---|
大脑计时器 |
机器人可以使用内置计时器。 |
|
|
传动系统 |
机器人可以使用带有内置惯性传感器的传动系统来跟踪机器人的当前航向和旋转角度。 |
|
|
左右距离 |
可以检测何时将一个或多个环装入左/右叉,或者左/右叉与环的距离。 |
|
|
中心距 |
可以检测移动目标或环距离 Moby 中心有多远。 |
|
|
保险杠开关 |
可以检测移动目标何时位于叉子之间并且可以被拾起。 |
|
|
光学的 |
报告物体是否靠近 Moby 的中心以及物体的颜色。 |
|
|
全球定位系统 |
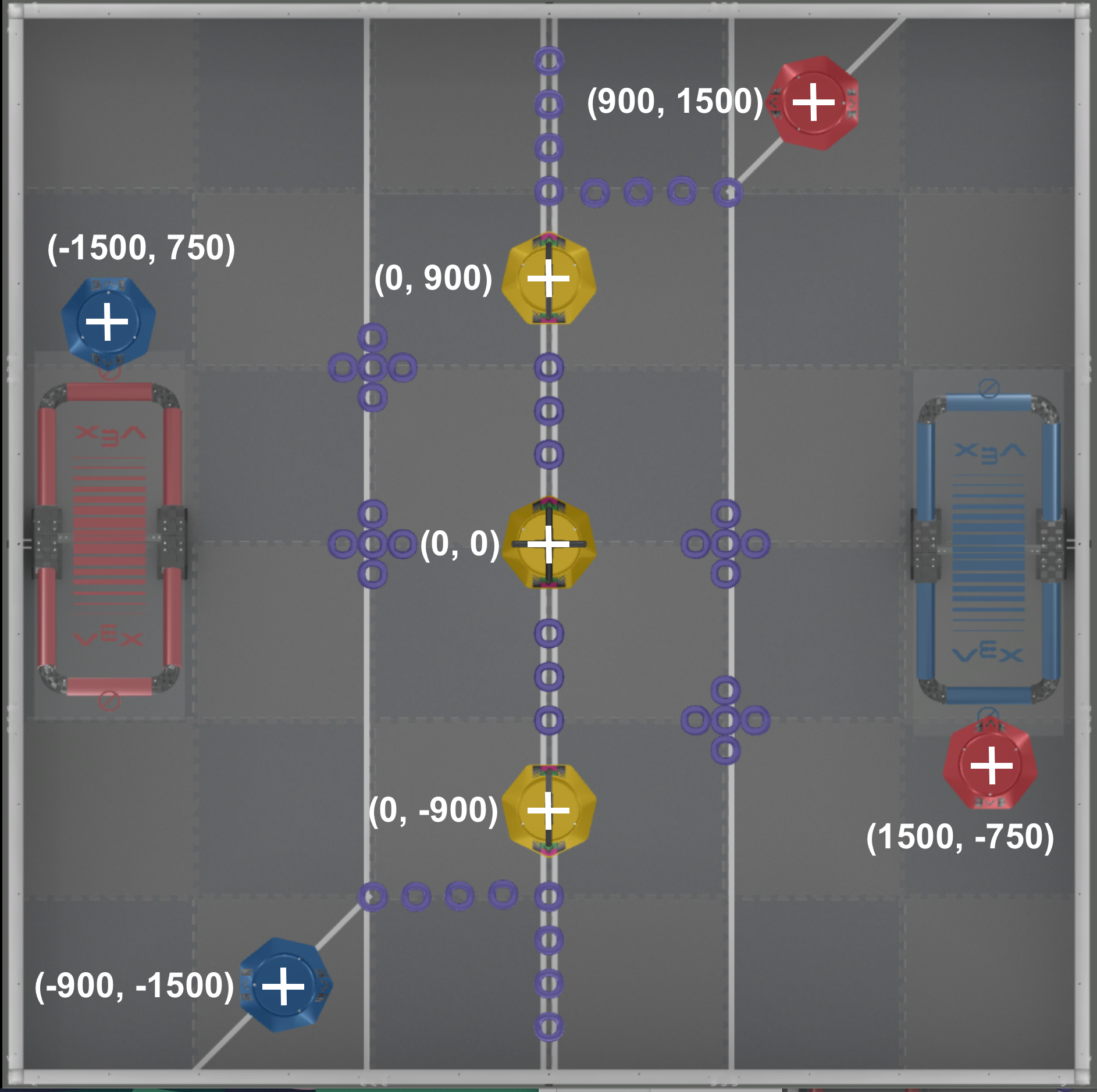
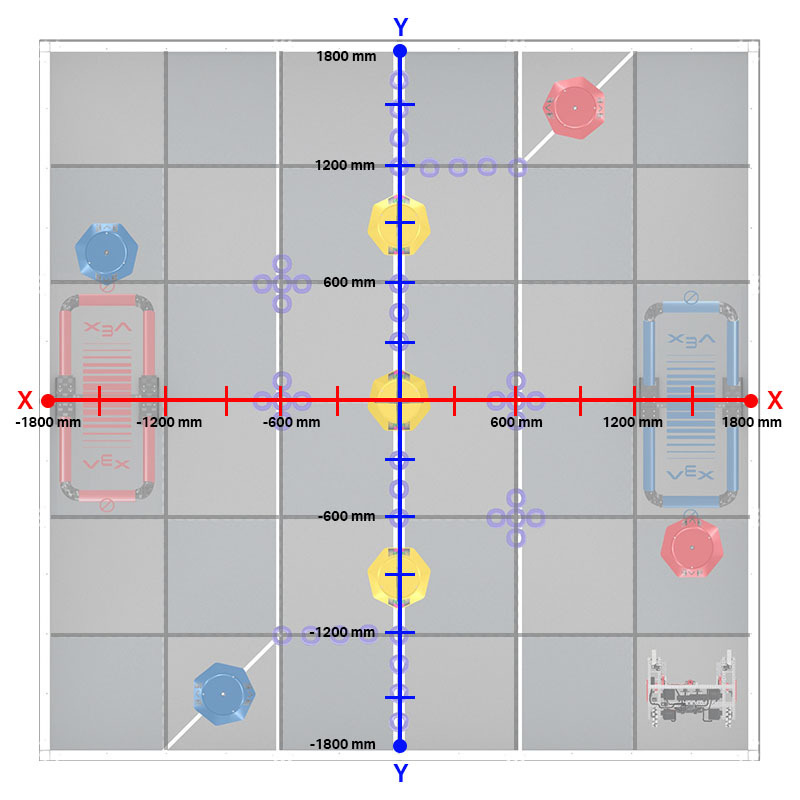
报告 Moby 旋转中心的当前 X 和 Y 位置(以毫米或英寸为单位)。GPS 传感器还可以报告当前航向(以度为单位)。 |
GPS 传感器依靠笛卡尔坐标系进行导航,其中场的中间为 (0, 0)。
了解游戏元素的坐标(例如移动目标)也可以帮助您在 V5RC Tipping Point 中规划项目。