Detalles del robot#
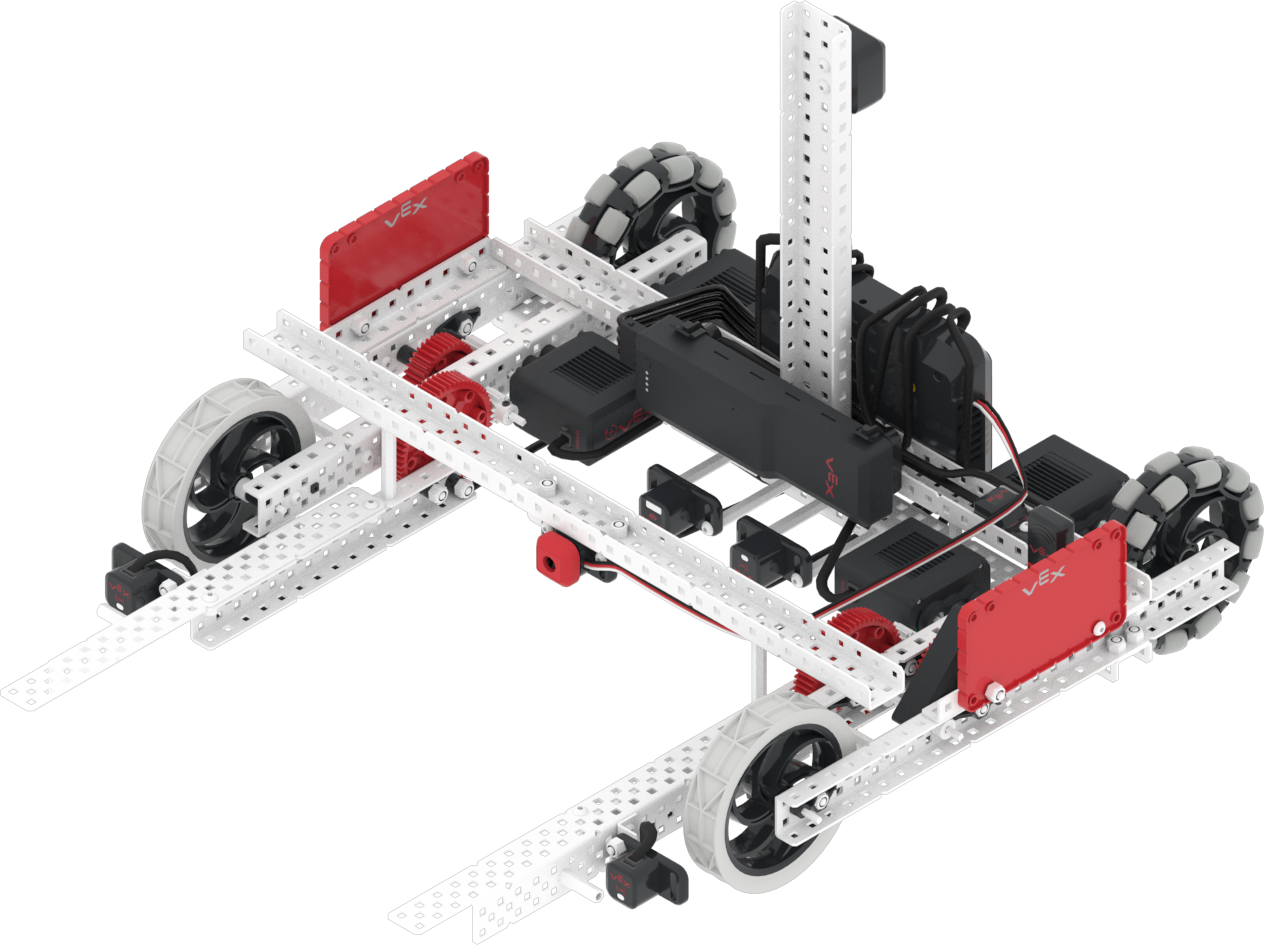
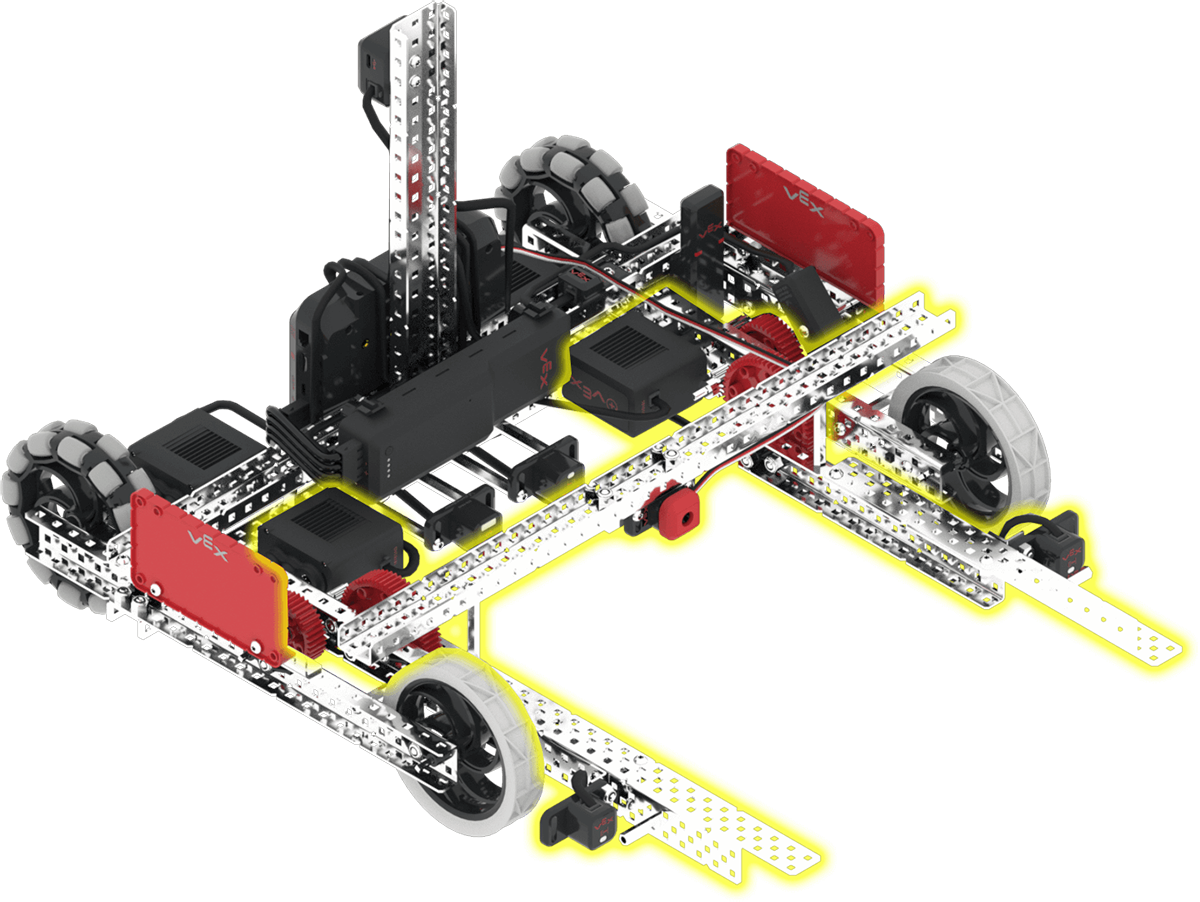
El patio de juegos V5RC Virtual Skills - Tipping Point utiliza el robot héroe VEX V5 estándar, Moby.
El Moby VEX V5 Hero Bot mide aproximadamente 350 milímetros de largo y 280 milímetros de ancho.
Grupos motores#
Moby está equipado con un grupo motor para sus horquillas.
Configuración y nombre del comando Python |
Descripción |
Documentación de la API |
|---|---|---|
|
Las horquillas se pueden subir y bajar. Esto permite al robot transportar y anotar aros y objetivos móviles. La posición predeterminada del grupo motor de la horquilla es 0 grados y se bajará hacia el suelo a 1700 grados. |
Sensores#
Moby tiene acceso a los siguientes sensores para codificación autónoma:
Configuración |
Descripción |
Documentación de la API |
Nombre del comando de Python |
|---|---|---|---|
Temporizador cerebral |
El robot tiene acceso a un temporizador incorporado. |
|
|
Transmisión |
El robot tiene acceso a un sistema de transmisión con un sensor inercial incorporado para rastrear el rumbo actual del robot y el ángulo de rotación. |
|
|
Distancia izquierda/derecha |
Puede detectar cuándo se carga un anillo o anillos en la horquilla izquierda/derecha, o qué tan lejos está la horquilla izquierda/derecha de un anillo. |
|
|
Distancia al centro |
Puede detectar qué tan lejos está un objetivo o anillo móvil del centro de Moby. |
|
|
Interruptor de parachoques |
Puede detectar cuando un objetivo móvil está entre las horquillas y se puede recoger. |
|
|
Óptico |
Informa si un objeto está cerca del centro de Moby y cuál es el color del objeto. |
|
|
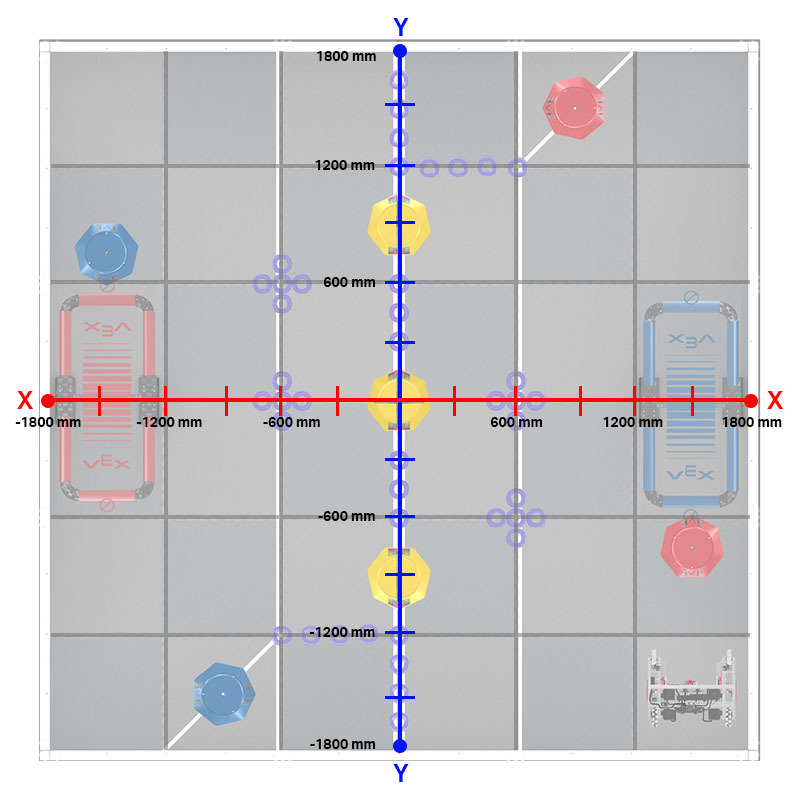
GPS |
Informa la posición actual en X e Y del centro de rotación del Moby en milímetros o pulgadas. El sensor GPS también puede informar el rumbo actual en grados. |
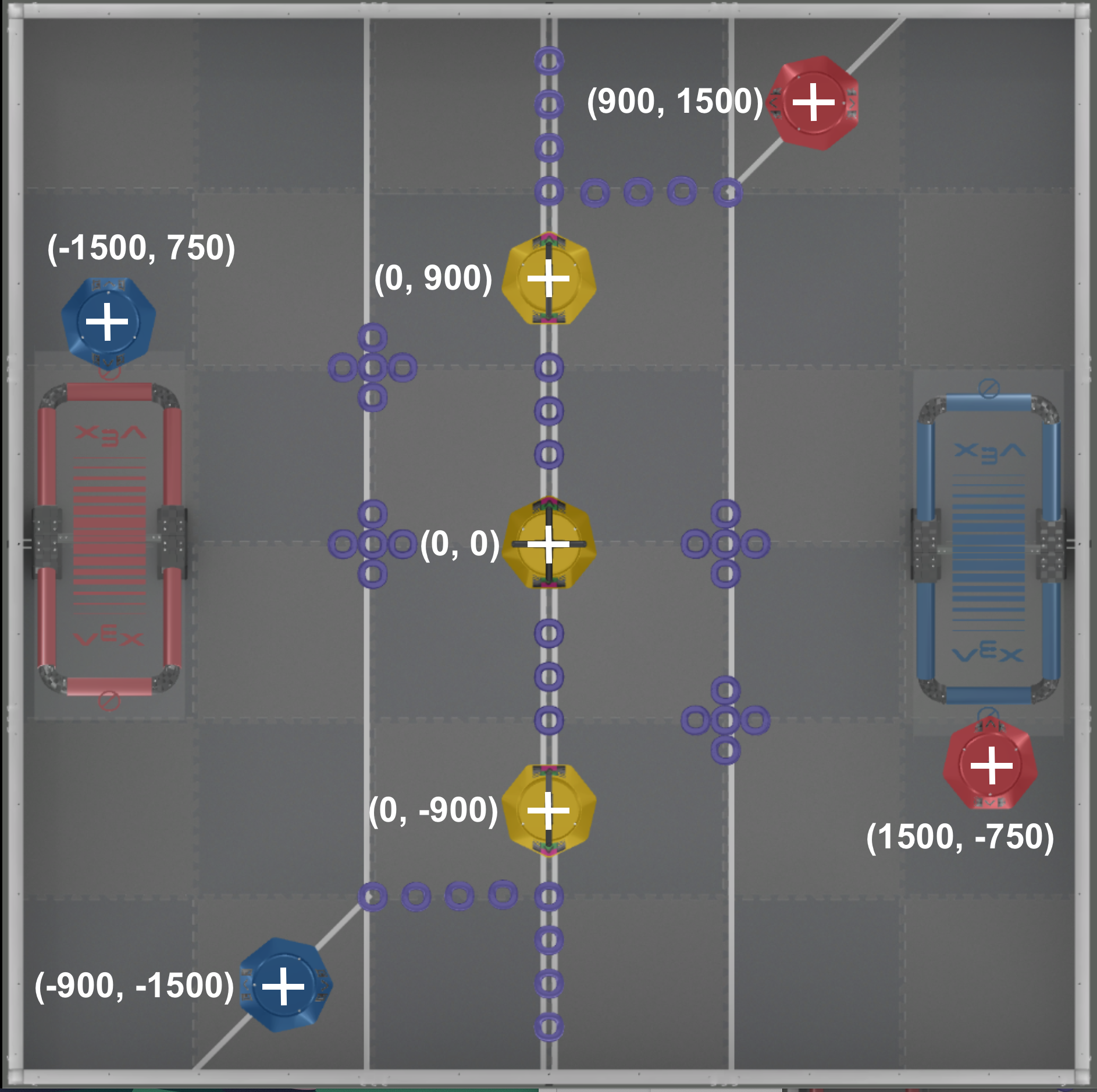
El sensor GPS se basa en el sistema de coordenadas cartesianas para navegar, siendo el centro del campo (0, 0).
Conocer las coordenadas de los elementos del juego, como los objetivos móviles, también puede ayudarte a planificar tus proyectos en V5RC Tipping Point.