Detalles del robot#
El patio de juegos VIQRC Virtual Skills - Rapid Relay utiliza el robot héroe VEX IQ estándar, Swish.
El Swish VEX IQ Hero Bot mide aproximadamente 350 milímetros de largo y 280 milímetros de ancho.

Grupos motores#
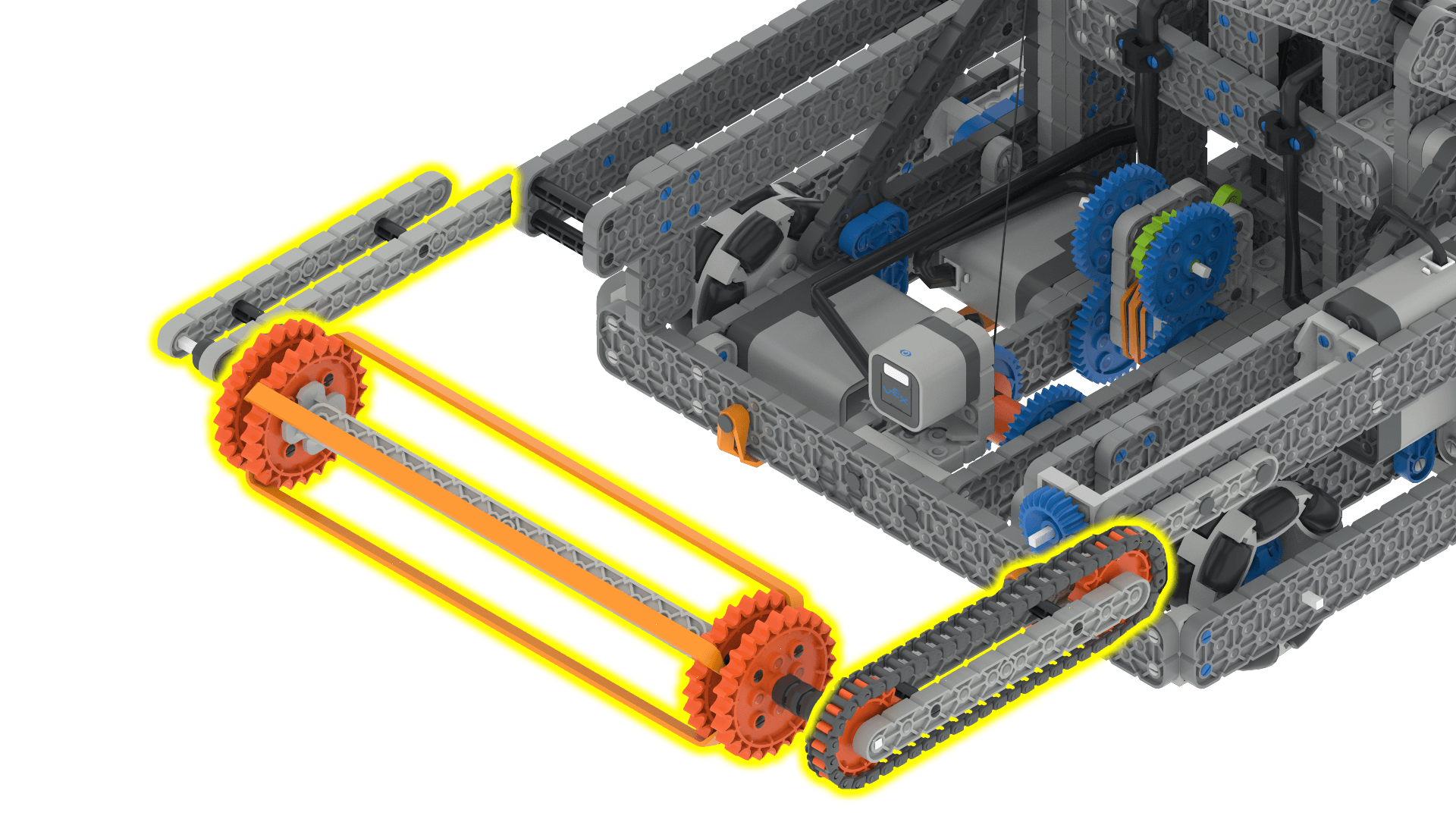
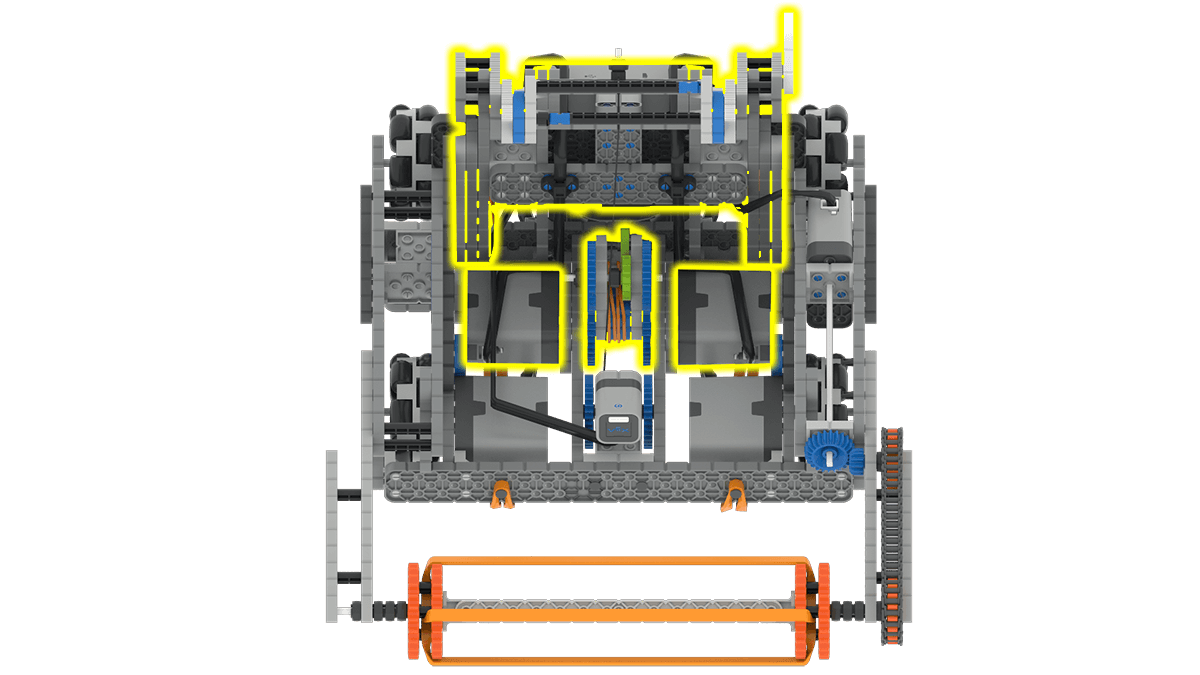
Swish está equipado con dos juegos de grupos motores para su admisión y catapulta.
Configuración y nombre del comando Python |
Descripción |
Documentación de la API |
|---|---|---|
|
El motor de admisión puede girar hacia adelante y hacia atrás. Esto permite al robot recoger bolas y colocarlas en su catapulta. |
|
|
El grupo motor del brazo de catapulta es un conjunto de motores que se utilizan para lanzar las pelotas que el robot ha recogido. |
Sensores#
Swish tiene acceso a los siguientes sensores para codificación autónoma:
Configuración |
Descripción |
Documentación de la API |
Nombre del comando de Python |
|---|---|---|---|
Temporizador cerebral |
El robot tiene acceso a un temporizador incorporado. |
|
|
Transmisión |
El robot tiene acceso a un sistema de transmisión con un sensor inercial incorporado para rastrear el rumbo actual del robot y el ángulo de rotación. |
|
|
Distancia trasera |
Indica la distancia entre la parte trasera del robot y la pared de la portería. |
|
|
Admisión óptica |
Informa cuando hay una bola en la entrada. |
|