光学传感器#
介绍#
光学传感器结合了RGB颜色传感器和接近传感器,用于检测附近物体的颜色、亮度和是否存在。它还可以利用内置的LED灯照亮物体,以实现更精确的检测。

以下是可用模块列表:
设置光学光#
“设置光学光”模块用于打开或关闭光学传感器的 LED。这有助于提高传感器检测颜色的精度。
设定 [Optical 1 v] 灯 [on v]
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
状态 |
光学传感器的指示灯状态:开或关。 |
当开始
[Turn on the sensor's LED.]
设定 [Optical 1 v] 灯 [on v]
设置光学功率#
“设置光学光功率”模块用于设置光学传感器的 LED 亮度。光线可以帮助光学传感器更清晰地检测物体和颜色。
百分比越高,灯光越亮;百分比越低,灯光越暗。
如果光传感器的灯熄灭,将灯光功率设置为 0% 以上即可打开灯。
如果光传感器的指示灯亮着,将光功率设置为 0% 将关闭指示灯。
设定 [Optical 1 v] 灯亮度为 [50]%
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
亮度 |
设置光学传感器的亮度,范围从 0% 到 100%。请使用整数。 |
当开始
[Turn on the sensor's LED at half brightness.]
设定 [Optical 1 v] 灯亮度为 [50]%
光学仪器发现了一个物体#
光学传感器检测到物体布尔模块报告光学传感器是否在范围内检测到物体。
正确 — 光学传感器检测到了物体。
错误 — 光学传感器未检测到物体。
<[Optical 1 v] 发现对象?>
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
例子
当开始
[Drive forward until an object is found.]
驱动 [向前 v]
等到 <[Optical 1 v] 发现对象?>
驱动停止
光学检测颜色#
光学检测颜色布尔模块根据检测到的色调值报告光学传感器是否检测到指定的颜色。
正确 – 传感器检测到了指定的颜色。
错误 – 传感器未检测到指定颜色。
注意: 光学传感器正在查找与指定颜色匹配的色调范围。要检测特定的色调范围,请参阅 光学色调 报告器模块。
<[Optical 1 v] 测得 [红色 v]?>
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
颜色 |
要查找的颜色:
|
例子
当开始
[Drive forward until red is found.]
驱动 [向前 v]
等到 <[Optical 1 v] 测得 [红色 v]?>
驱动停止
光学亮度#
光学亮度报告模块以百分比(0% 到 100%)报告有多少光反射回光学传感器。
百分比越高,意味着反射回光学传感器的光线越多;百分比越低,意味着反射回的光线越少。
([Optical 1 v] 亮度百分比)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
光学色调#
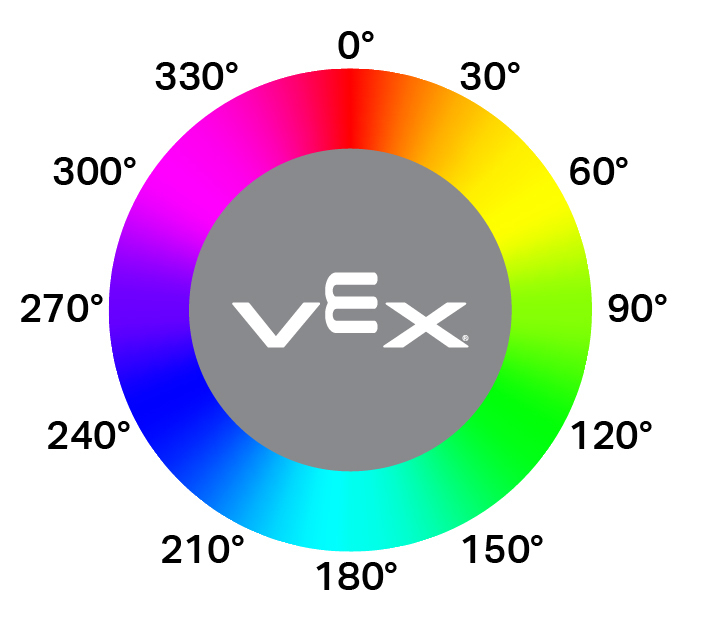
光学色调报告模块将光学传感器检测到的色调报告为 0 到 359 度之间的数字。
色相是用色轮上的数字来描述颜色的一种方法。
([Optical 1 v] 色调度数)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
例子
当开始
[Look for the color pink using hue.]
永久循环
清屏
在屏幕上设定光标至 [1] 行 [1] 列
如果 <[300] [math_less_than v] ([Optical 1 v] 色调度数) [math_less_than v] [359]> 那么
在屏幕上打印 [This is pink!]▶
否则
在屏幕上打印 [No pink detected!]▶
光学#
当光学传感器检测到或丢失物体时,when Optical 模块会运行所连接的模块堆栈。
当 [Optical 1 v] [detects v] 一个对象 :: hat events
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的光学传感器。 |
状态 |
当附加的积木栈运行时:detects 会在检测到未检测到的对象时运行,而 loses 会在检测到的对象不再被检测到时运行。 |