光学的#
介绍#
光学传感器是一种基于光的传感器,它使用反射光来检测物体、识别颜色以及测量亮度和色调。
您还可以配置传感器内部指示灯的亮度。这些工具非常适合需要实时响应彩色物体、光照条件或传感器反馈的程序。
This page uses optical_1 as the example Optical Sensor name. Replace it with your own configured name as needed.
以下是所有方法的列表:
操作——打开或关闭光学传感器的 LED 指示灯。
set_light— Sets the on or off state of the LED.
自定义设置 — 调整 LED 亮度和物体检测设置。
set_light_power— Sets the brightness of the LED.object_detect_threshold— Sets the threshold for detecting objects.
获取器 — 读取物体是否存在、颜色、亮度、色调、RGB 值和传感器状态。
is_near_object— Returns whether a detected object is near the Optical Sensor.color— Returns the closest detected color match.brightness— Returns the brightness of a detected object.hue— Returns the hue of a detected object.rgb— Returns the RGB values detected by the Optical Sensor.installed— Returns whether an Optical Sensor is connected to the Brain.
回调函数——当检测到物体或物体丢失时运行的代码。
object_detected— Registers a function to be called when an object is detected.object_lost— Registers a function to be called when an object is lost.
构造函数——手动初始化和配置光学传感器。
Optical— Creates an Optical Sensor.
行动#
set_light#
set_light sets Optical Sensor’s LED to on, off, or a set brightness level.
Usage:
optical_1.set_light(state)
参数 |
描述 |
|---|---|
|
The state to set the light or the percentage of power in the range 0 to 100. The state can be either of the following:
|
# Turn the LED on and off forever
while True:
optical_1.set_light(LedStateType.ON)
wait(0.5, SECONDS)
optical_1.set_light(LedStateType.OFF)
wait(0.5, SECONDS)
# Turn the LED on and off forever
while True:
optical_1.set_light(100)
wait(0.5, SECONDS)
optical_1.set_light(0)
wait(0.5, SECONDS)
修改器#
set_light_power#
set_light_power sets the brightness of the Optical Sensor’s light. If the LED is not already on, this method will also turn the LED on.
Usage:
optical_1.set_light_power(value)
参数 |
描述 |
|---|---|
|
将灯光的功率级别设置为从 0 到 100 的百分比。 |
# Turn the LED light on at different
# intensities
optical_1.set_light(LedStateType.ON)
wait(2, SECONDS)
optical_1.set_light_power(10)
wait(2, SECONDS)
optical_1.set_light_power(100)
object_detect_threshold#
object_detect_threshold sets the range that the sensor can detect objects from. This method also returns the newly set threshold.
数字越接近 255,表示范围越小;数字越接近 0,表示范围越大。
Usage:
optical_1.object_detect_threshold(value)
参数 |
描述 |
|---|---|
|
0 - 255 范围内的数字。值为 0 时将仅返回当前值。 |
def detected():
# The Brain will print that an object was detected on
# the Brain's screen.
brain.screen.print("object detected")
brain.screen.next_row()
optical_1.object_detect_threshold(254)
optical_1.object_detected(detected_closer)
def detected_closer():
# Detect an object closer to the sensor.
brain.screen.print("Detected closer")
# Run detected when the Optical Sensor detects an object.
optical_1.object_detect_threshold(100)
optical_1.object_detected(detected)
# Detect an object first with the detect threshold at 100,
# then again at 254
stage = 0
def detected():
global stage
if stage == 0:
brain.screen.print("Get closer...")
brain.screen.next_row()
stage = 1
optical_1.object_detect_threshold(254)
optical_1.object_detected(detected_closer)
def detected_closer():
global stage
if stage == 1:
brain.screen.print("Too close!")
brain.screen.next_row()
stage = 2
optical_1.object_detect_threshold(100)
optical_1.object_detected(detected)
wait(15, MSEC)
吸气剂#
is_near_object#
is_near_object returns whether the Optical Sensor is nearby an object.
True— The sensor is near an object.False— The sensor is not near an object.
Usage:
optical_1.is_near_object()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Stop driving when Optical Sensor is
# near an object
while True:
if optical_1.is_near_object():
drivetrain.stop()
else:
drivetrain.drive(FORWARD)
color#
color returns the predefined color detected by the Optical Sensor from the colors below:
BLACKBLUECYANGREENORANGEPURPLEREDTRANSPARENTWHITEYELLOW
Usage:
optical_1.color()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Stop the robot if the Optical Sensor
# detects red
while True:
if optical_1.color() == Color.RED:
drivetrain.stop()
else:
drivetrain.turn(RIGHT)
brightness#
brightness returns the brightness detected by the Optical Sensor.
百分比越高,表示光学传感器检测到的光线越多;百分比越低,表示光学传感器检测到的光线越少。
Usage:
optical_1.brightness(readraw)
参数 |
描述 |
|---|---|
|
Optional. A Boolean value to read raw brightness data instead of percentage:
|
hue#
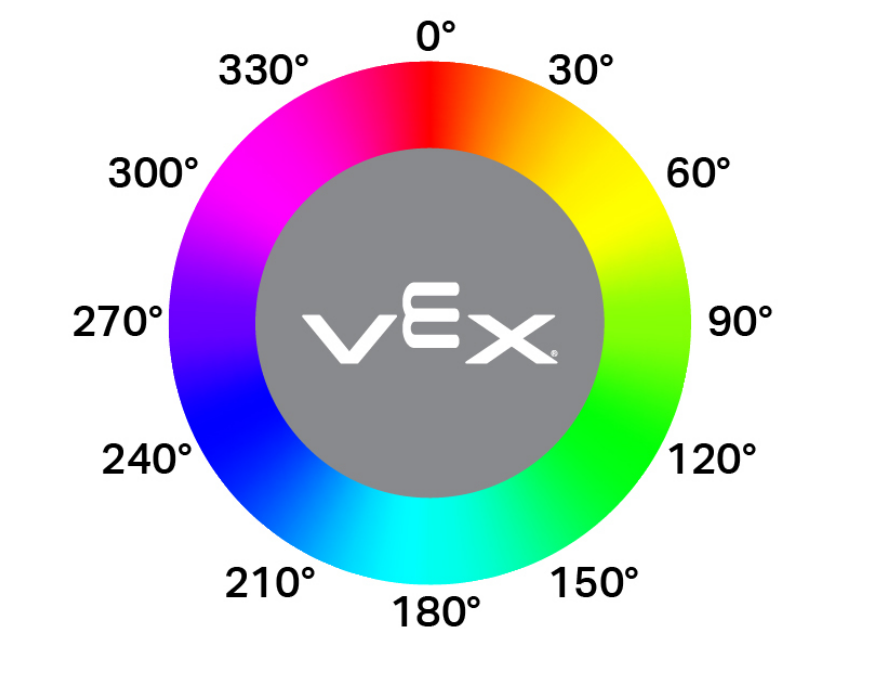
hue returns the value of the hue detected by the Optical Sensor as a float in the range of 0 to 359.99 degrees.
色相是一种用色轮上的数字来描述颜色的方法,如下图所示。
Usage:
optical_1.hue()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Check the hue of a detected object
# to determine if it is pink
while True:
brain.screen.clear_screen()
brain.screen.set_cursor(1, 1)
if 290 < optical_1.hue() < 350:
brain.screen.print("Pink!")
wait(0.1,SECONDS)
else:
brain.screen.print("Not pink.")
wait(0.1,SECONDS)
rgb#
rgb returns the red, green, blue, and brightness values detected by the Optical Sensor as a Tuple.
Usage:
optical_1.rgb(raw)
参数 |
描述 |
|---|---|
|
Optional. A Boolean value to determine if you return raw or processed values:
|
# Display the rgb values and brightness detected
# by the Optical Sensor.
brain.screen.set_font(FontType.MONO12)
while True:
brain.screen.clear_screen()
brain.screen.set_cursor(1, 1)
brain.screen.print(optical_1.rgb())
wait(0.1, SECONDS)
installed#
installed returns a Boolean indicating whether the Optical Sensor is connected to the Brain.
True— The Optical Sensor is connected to the Brain.False— The Optical Sensor is not connected to the Brain.
Usage:
optical_1.installed()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Display a message if the Optical Sensor
# is installed.
if optical_1.installed():
brain.screen.print("Installed!")
打回来#
object_detected#
object_detected registers a callback function for when an object is detected.
Usage:
optical_1.object_detected(callback, arg)
参数 |
描述 |
|---|---|
|
先前定义的当检测到对象时要执行的函数。 |
|
可选。包含要传递给回调函数的参数的元组。更多信息,请参阅带参数的函数](…/Logic/Functions.md#functions-with-parameters)。 |
def detected():
drivetrain.stop()
brain.screen.set_cursor(1, 1)
brain.screen.print("object detected")
wait(0.5,SECONDS)
brain.screen.clear_screen()
# Display a message when the
# Optical Sensor detects an object
drivetrain.drive(FORWARD)
optical_1.object_detected(detected)
object_lost#
object_lost registers a callback function for when the Optical Sensor loses a detected object.
Usage:
optical_1.object_lost(callback, arg)
参数 |
描述 |
|---|---|
|
先前定义的当对象丢失时执行的函数。 |
|
可选。包含要传递给回调函数的参数的元组。更多信息,请参阅带参数的函数](…/Logic/Functions.md#functions-with-parameters)。 |
def lost():
drivetrain.stop()
brain.screen.set_cursor(1, 1)
brain.screen.print("object lost")
wait(0.5,SECONDS)
brain.screen.clear_screen()
# Display a message when the Optical
# Sensor loses sight of on object
drivetrain.drive(REVERSE)
optical_1.object_lost(lost)
构造函数#
Constructors are used to manually create Optical objects, which are necessary for configuring an Optical Sensor outside of VEXcode.
Optical#
Optical creates an Optical Sensor.
Usage:
Optical(smartport)
范围 |
描述 |
|---|---|
|
光传感器所连接的智能端口,记为 PORTx,其中 x 为端口号。 |
# Construct an Optical Sensor "optical_1" with the
# Optical class
optical_1 = Optical(Ports.PORT1)
# Display the brightness of a red object detected
# by the Optical Sensor
drivetrain.turn(RIGHT)
while not optical_1.color() == Color.RED:
wait(50, MSEC)
drivetrain.stop()
brain.screen.print(optical_1.brightness())