机器人详细信息#
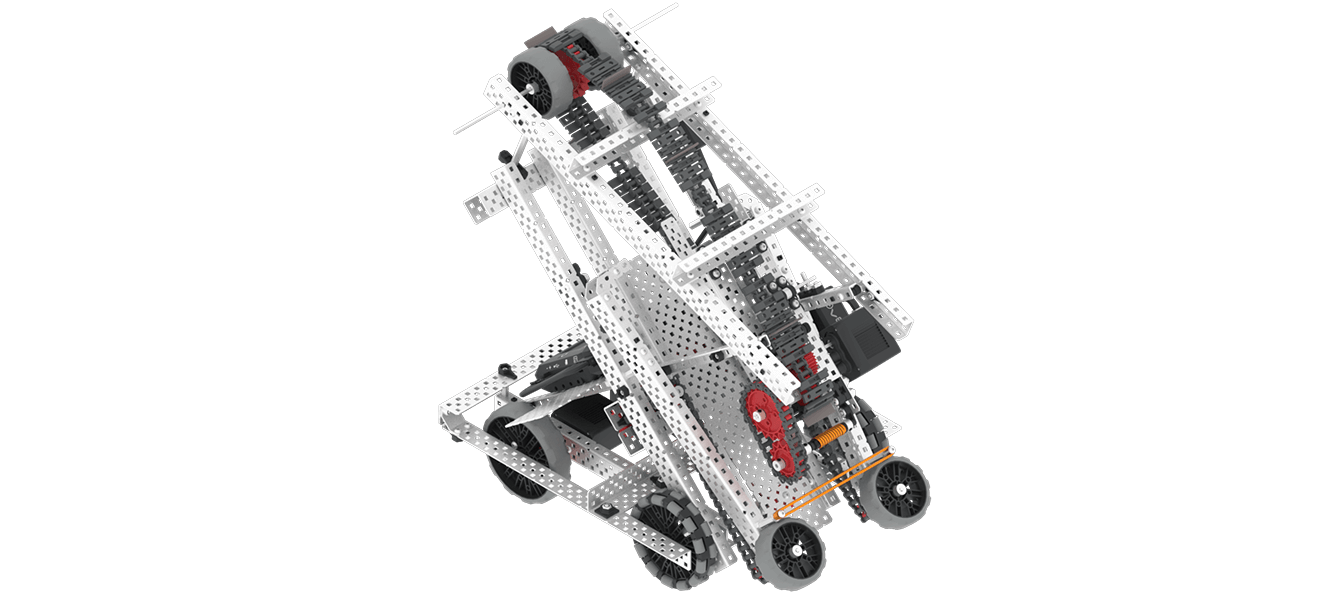
V5RC 虚拟技能 - 推回 游乐场使用标准 VEX V5 英雄机器人,Dex。
汽车集团#
Dex 配备了两套用于进气和传送的电机组。
配置 & |
描述 |
API 文档 |
|---|---|---|
|
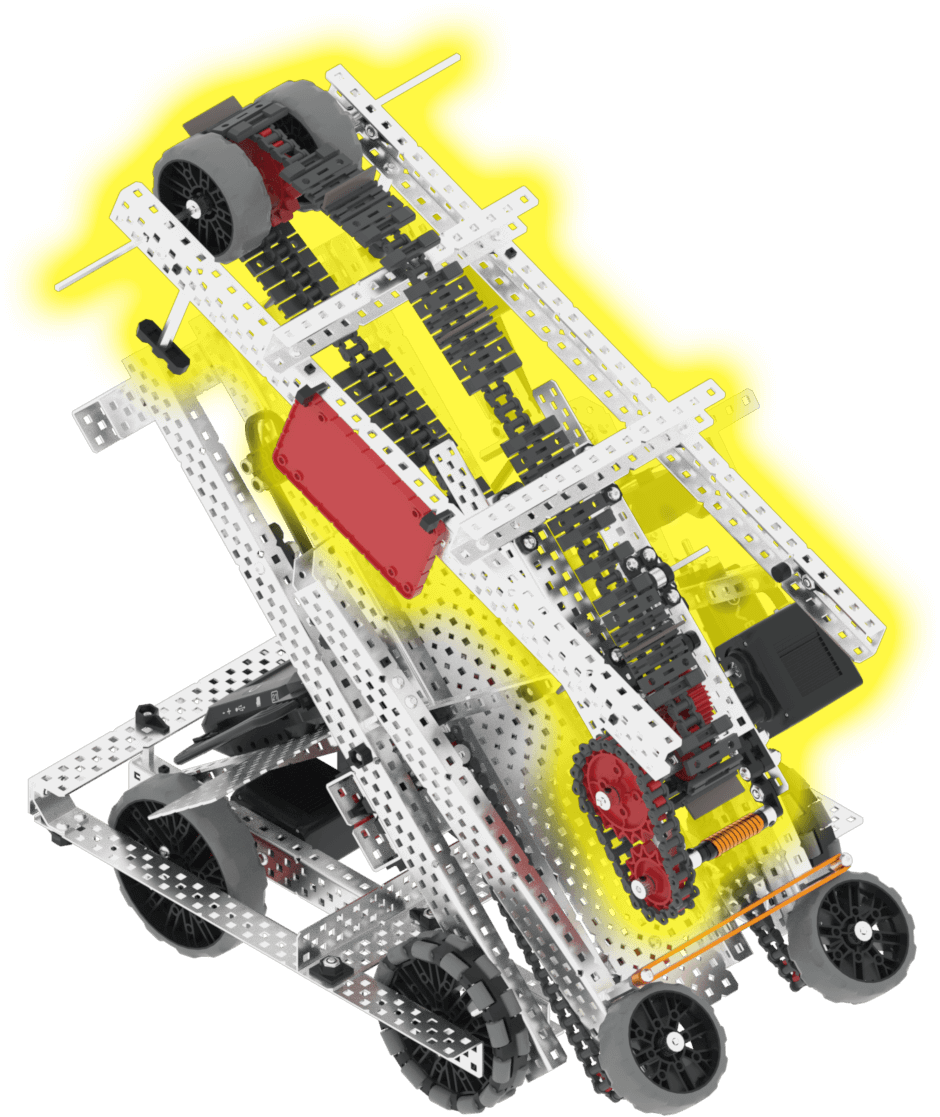
The Conveyor Motor moves Blocks from the intake and up to the top of the robot so the Block can be pushed into a goal. |
|
|
The Intake Motor rotates the two wheels at the front of the robot. This allows for Blocks to be picked up off the ground. |
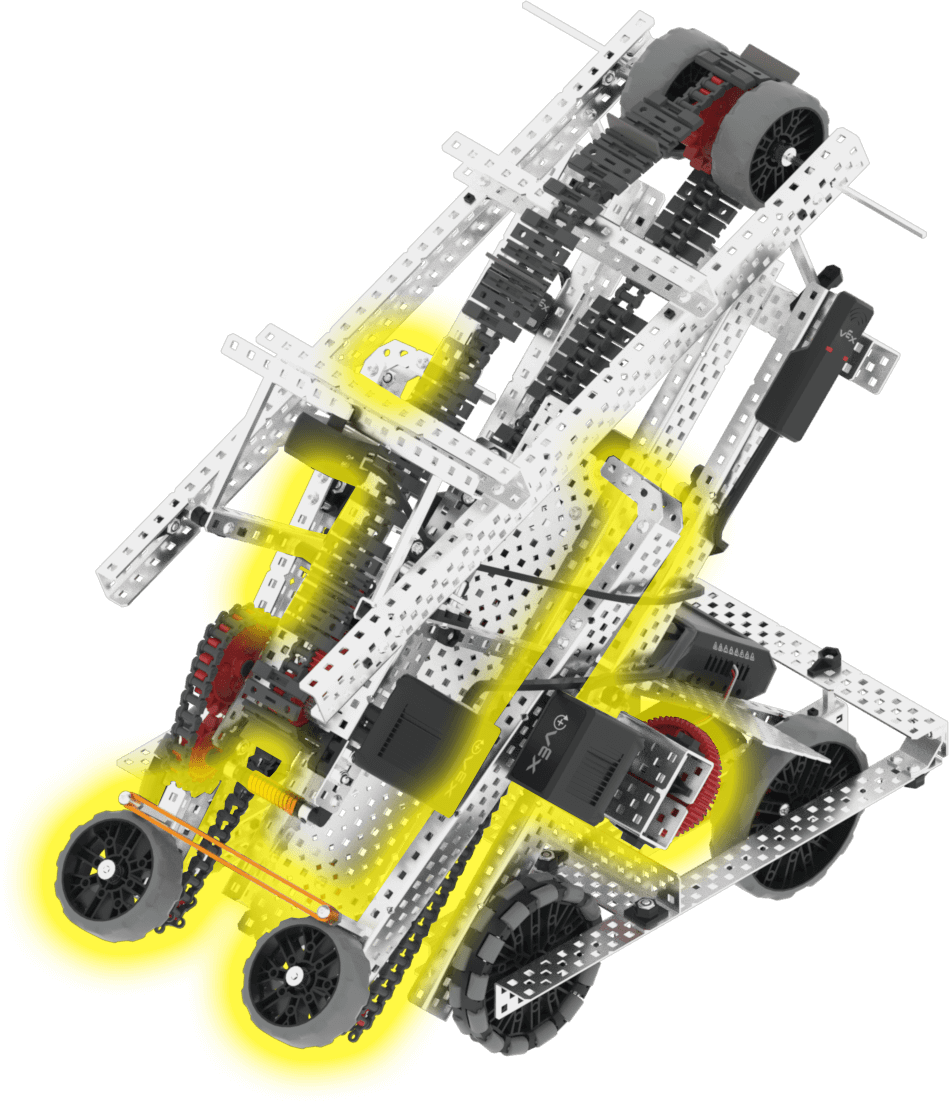
传感器#
Dex 可以访问以下传感器进行自主编码:
配置 |
描述 |
API 文档 |
Python 命令名称 |
|---|---|---|---|
大脑计时器 |
该机器人可以使用内置计时器。 |
|
|
惯性 |
机器人可以使用惯性传感器来跟踪机器人的当前航向和旋转角度。 |
|
|
电机编码器 |
机器人的电机配有编码器,可以跟踪传送电机和进气电机的当前旋转角度和位置。 |
|
|
距离 |
机器人背部装有距离传感器,使其能够在倒车时测量与目标的距离。0 |
|
|
光学的 |
返回机器人传送带顶部是否存在方块。这也可以确定物体的颜色,以便机器人区分红色方块和蓝色方块。 |
|
|
保险杠 |
返回机器人传送带底部是否存在块。 |
|
|
GPS(游戏定位系统™) |
以毫米或英寸为单位报告 Dex 旋转中心的当前 X 和 Y 位置。GPS 传感器还可以报告当前航向(以度为单位) |
|
|
人工智能视觉传感器 |
可以自动区分得分要素的摄像头,使机器人能够自主地朝着特定的得分要素移动。 |
|