GPS传感器#
介绍#
V5 GPS(游戏定位系统™)传感器可为 VEX 场地上的机器人提供精确的位置和方向跟踪。它利用场地周边的 GPS 场地代码实时计算机器人的 X 和 Y 坐标以及航向。
GPS 传感器使用在“设备”窗口中配置 GPS 传感器时输入的偏移量自动计算出的参考点来返回机器人的位置。
有关 GPS 传感器的更多信息,请阅读 VEX 库中的 将 GPS 传感器与 VEX V5 一起使用。
参考点作为 GPS 传感器自身的 (0, 0) 位置,GPS 模块返回的所有坐标、航向和运动都相对于此配置点。

以下是可用模块列表:
校准 GPS#
“校准 GPS”模块用于校准参考点,将其配置的航向设置为当前驱动系统的航向。在此期间,机器人必须保持完全静止,因为校准过程中的任何移动都会导致结果不准确。
校准 [GPS 1 v]
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
设置 GPS 位置#
“设置 GPS 位置”模块用于手动设置场地上参考点的位置和方向。如果 GPS 传感器在启动时距离场地墙壁太近,导致无法接收到足够的 GPS 场地代码,则此操作有助于减少误差。
设置 [GPS 1 v] 设置为 [0] [0] [毫米 v] 和 [0] 度
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
x |
场上参考点的 x 坐标。 |
是 |
场上参考点的 y 坐标。 |
坐标单位 |
x 和 y 坐标的计量单位:
|
标题 |
参考点相对于绝对场航向的航向,范围从 0 度到 359.9 度。 |
GPS定位#
GPS 位置 模块返回场上参考点的 x 或 y 坐标。
([GPS 1 v] [X v] 位置 [毫米 v] :: custom-sensing)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
轴 |
使用哪个坐标轴:
|
单元 |
计量单位:
|
GPS航向#
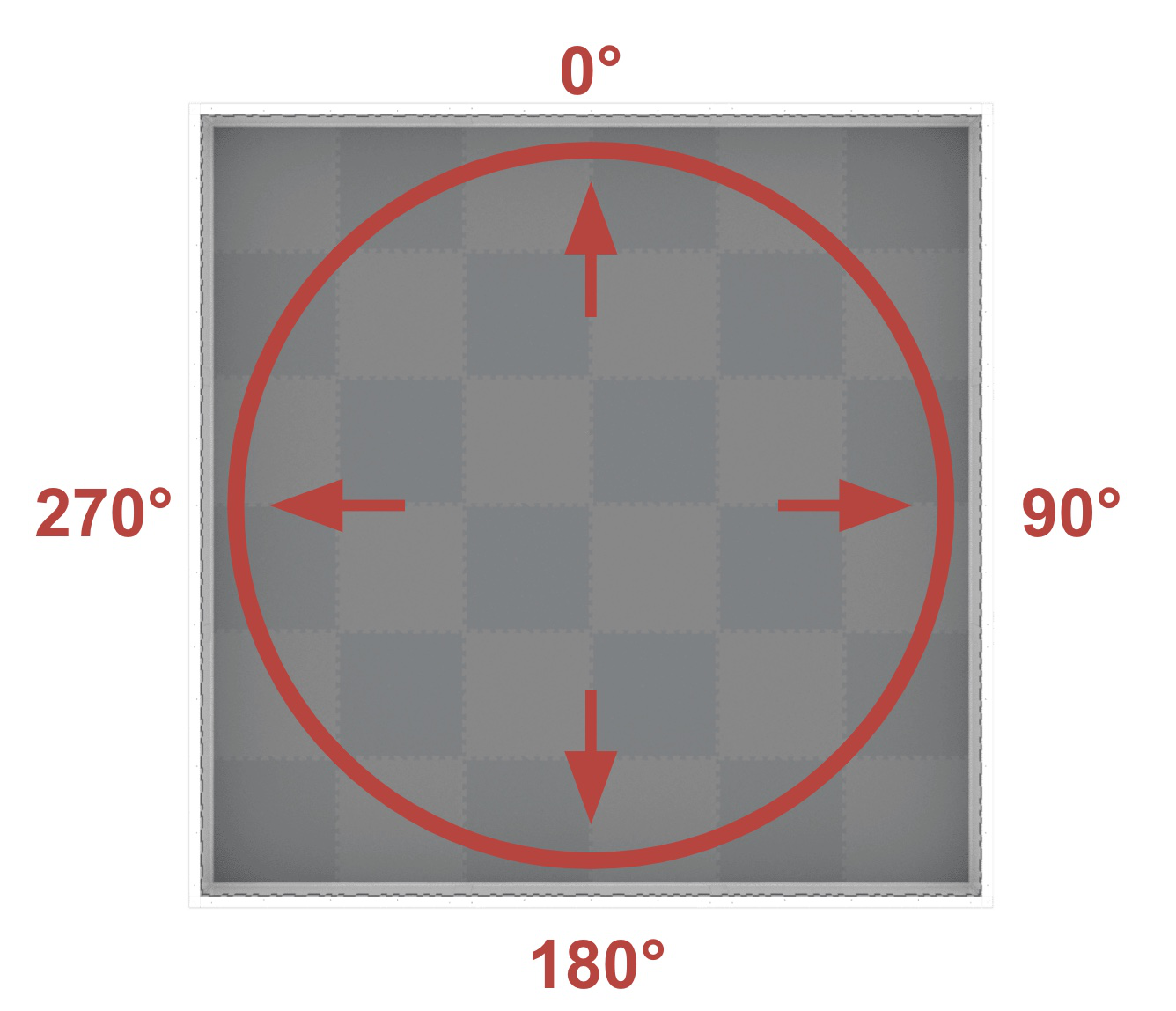
GPS航向模块根据场的方向返回参考点的航向,范围从0度到359.9度。
该航向对应于绝对航向,其范围为顺时针方向的 0º 至 359.9º。0º 位于 12 点钟位置。
([GPS 1 v] 归位角度值)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
GPS加速#
GPS 加速度 模块返回机器人在指定轴上的加速度,范围从 -4.0 G 到 4.0 G。
([GPS 1 v] [X v] 轴加速度值)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
轴 |
使用哪个轴:
|
GPS陀螺仪速率#
GPS陀螺仪速率模块返回机器人在选定轴上的旋转速度。
([GPS 1 v] 陀螺仪在 [X v] 轴上角速度 [dps v] 值)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
轴 |
使用哪个轴:
|
单元 |
计量单位:
|
GPS定位#
GPS 方向 模块以度为单位返回机器人的横滚、俯仰或偏航方向。
([GPS 1 v] [横滚 v] 偏转角度值)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
方向 |
要恢复哪个方向:
|
GPS信号质量#
GPS 信号质量 模块以百分比形式返回 GPS 传感器的信号强度。
可能的值 |
描述 |
|---|---|
100 |
GPS传感器报告的所有位置和航向数据均有效。 |
约90 |
位置数据不再通过捕获 GPS 场代码信息来计算,而是通过其他方式计算。 |
0-80 |
只有 GPS 传感器的航向值是有效的,但随着时间的推移,GPS 传感器扫描到的 GPS 场码不足以准确确定位置和航向信息,报告的信号质量将持续下降,直到 0,此时所有 GPS 传感器数据实际上都被冻结,不再有效。 |
([GPS 1 v] 信号质量 %)
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |
GPS航向改变时#
当 GPS 传感器检测到航向变化时,当 GPS 航向发生变化时 模块会运行所附的堆栈。
当 [GPS 1 v] 方向改变 :: hat events
参数 |
描述 |
|---|---|
设备 |
在“设备”窗口中配置要使用的 GPS 传感器。 |