Sensor GPS#
Introducción#
El sensor V5 GPS (Game Positioning System™) proporciona un seguimiento preciso de la posición y la orientación de un robot en el campo VEX. Utiliza el código de campo GPS alrededor del perímetro del campo para calcular las coordenadas X e Y del robot y su rumbo en tiempo real.
El sensor GPS devuelve la posición del robot utilizando un punto de referencia calculado automáticamente a partir de los desplazamientos ingresados al configurar el sensor GPS en la ventana Dispositivos.
Para obtener más información sobre el sensor GPS, lea Uso del sensor GPS con VEX V5 en la biblioteca VEX.
El punto de referencia actúa como la posición propia (0, 0) del sensor GPS, donde todas las coordenadas, rumbos y movimientos devueltos por los bloques GPS son relativos a este punto configurado.

A continuación se muestra una lista de bloques disponibles:
calibrar GPS – Calibra el sensor GPS para establecer su rumbo como el rumbo actual del tren motriz.
Establecer ubicación GPS – Establece la posición y el rumbo del punto de referencia en el campo.
Posición GPS – Devuelve la coordenada x o y del punto de referencia en el campo.
Rumbo GPS – Devuelve el rumbo del punto de referencia en función de la orientación del campo.
Aceleración GPS – Devuelve la aceleración del robot en un eje seleccionado.
Velocidad de giro GPS – Devuelve la velocidad de rotación del robot en un eje seleccionado.
Orientación GPS – Devuelve la orientación de balanceo, cabeceo o guiñada del robot en grados.
Calidad de la señal GPS – Devuelve la intensidad de la señal del sensor GPS.
cuando cambia el rumbo del GPS – Ejecuta la pila adjunta siempre que el sensor GPS detecta un cambio en el rumbo.
calibrar GPS#
El bloque calibrar GPS calibra el punto de referencia, estableciendo su rumbo configurado como el rumbo actual del tren motriz. Durante este tiempo, el robot debe permanecer completamente inmóvil, ya que el movimiento durante la calibración producirá resultados inexactos.
calibrar [GPS 1 v]
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
establecer ubicación GPS#
El bloque establecer ubicación GPS establece manualmente la posición y el rumbo del punto de referencia en el campo. Esto permite reducir las imprecisiones si el sensor GPS está demasiado cerca de las paredes del campo al inicio para obtener suficiente información del código de campo GPS.
Establezca la ubicación [GPS 1 v] en [0] [0] [mm v] y [0] grados
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
incógnita |
La coordenada x del punto de referencia en el campo. |
y |
La coordenada y del punto de referencia en el campo. |
unidad de coordenadas |
La unidad de medida para las coordenadas x e y:
|
título |
El rumbo hacia el que se orienta el punto de referencia en relación con el rumbo del campo absoluto, de 0 a 359,9 grados. |
Posición GPS#
El bloque Posición GPS devuelve la coordenada x o y del punto de referencia en el campo.
([GPS 1 v] posición [X v] en [mm v] :: custom-sensing)
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
eje |
¿Qué eje utilizar:
|
unidad |
La unidad de medida:
|
Rumbo GPS#
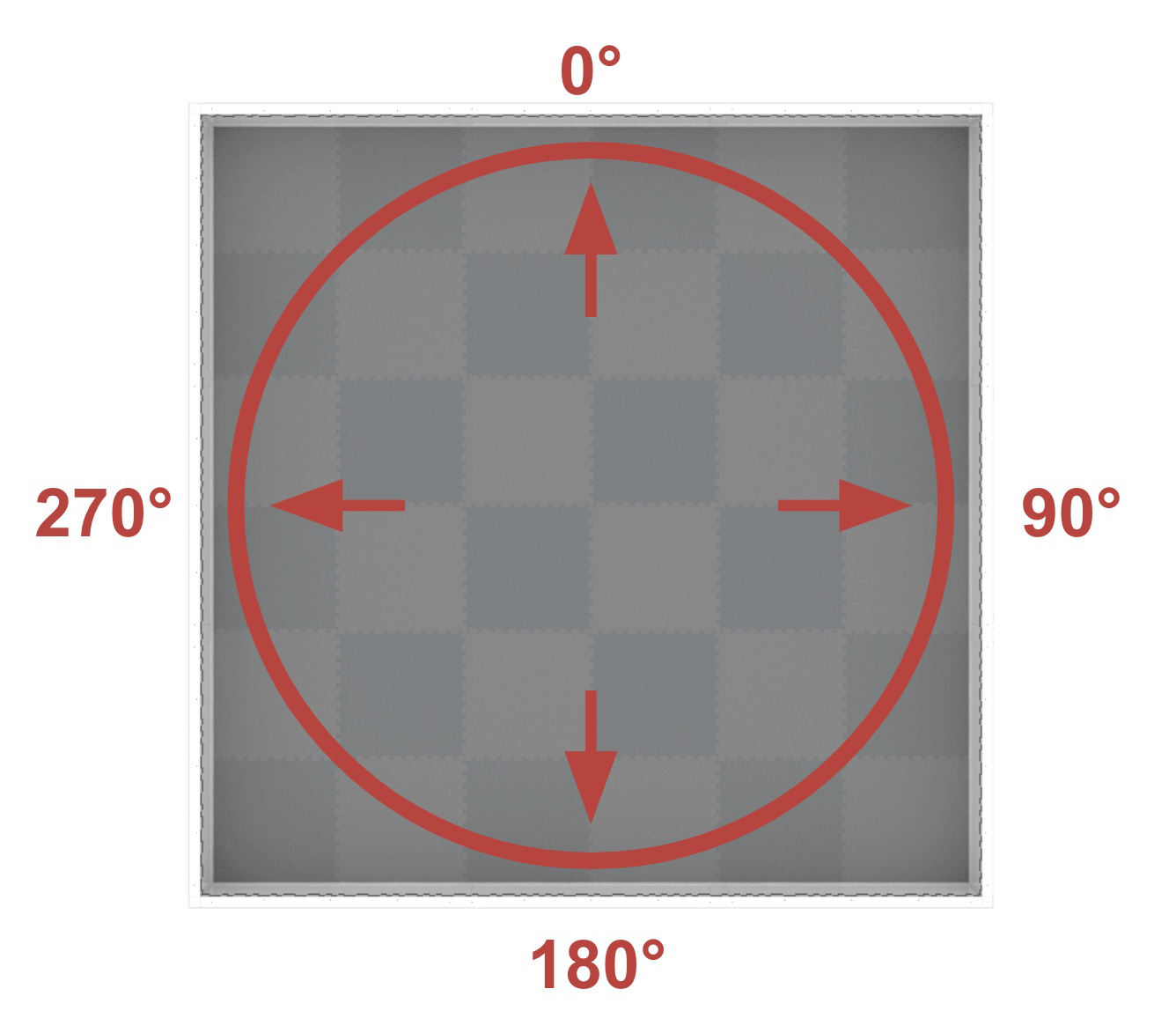
El bloque Rumbo GPS devuelve el rumbo del punto de referencia en función de la orientación del campo de 0 a 359,9 grados.
El rumbo corresponde al rumbo absoluto del campo, que abarca un rango de 0º a 359,9º en sentido horario. El 0º se encuentra en la posición de las 12 en punto.
([GPS 1 v] rumbo en grados)
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
Aceleración GPS#
El bloque Aceleración GPS devuelve la aceleración del robot en un eje especificado de -4,0 a 4,0 Gs.
([GPS 1 v] aceleración de [X v] eje en g)
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
eje |
¿Qué eje utilizar:
|
Velocidad del giroscopio GPS#
El bloque velocidad de giro GPS devuelve la velocidad de rotación del robot en un eje seleccionado.
([GPS 1 v] velocidad de giro de [X v] eje en [dps v])
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
eje |
¿Qué eje utilizar:
|
unidad |
La unidad de medida:
|
Orientación GPS#
El bloque Orientación GPS devuelve la orientación de balanceo, cabeceo o guiñada del robot en grados.
([GPS 1 v] orientación de [rollo v] en grados)
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
orientación |
¿A qué orientación regresar?:
|
Calidad de la señal GPS#
El bloque Calidad de la señal GPS devuelve la intensidad de la señal del sensor GPS como un porcentaje.
Valores posibles |
Descripción |
|---|---|
100 |
Todos los datos de posición y rumbo informados por el sensor GPS son válidos. |
~90 |
Los datos de posición ya no se calculan capturando información del código de campo GPS, sino a través de medios alternativos. |
0 - 80 |
Solo los valores de rumbo del sensor GPS son válidos, pero a medida que pasa el tiempo en el que un sensor GPS no escanea lo suficiente del código de campo GPS para determinar con precisión la información de posición y rumbo, la calidad de la señal informada continuará cayendo hasta 0, donde todos los datos del sensor GPS quedan efectivamente congelados y ya no son válidos. |
([GPS 1 v] calidad de señal en %)
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |
cuando cambió el rumbo del GPS#
El bloque cuando cambia el rumbo del GPS ejecuta la pila adjunta siempre que el sensor GPS detecta un cambio en el rumbo.
cuando cambió el rumbo [GPS 1 v] :: hat events
Parámetros |
Descripción |
|---|---|
dispositivo |
Qué sensor GPS utilizar, configurado en la ventana Dispositivos. |