V5 高风险(轴)#
Axel 是 VEX V5 Hero Bot,用于 V5RC 24-25 高风险游乐场。
机器人概览#
Axel 支持标准 VR 控制和传感器,例如惯性传感器和脑计时器,此外,Axel 还具有一些特定于机器人的功能,这些功能在 机器人专用模块 和 机器人专用 Python 中进行了介绍。
电机#
配置和 |
描述 |
|---|---|
|
机械臂负责升降Axel的手臂。机械臂必须抬起 |
|
推杆电机驱动推杆沿臂向下移动。这样就可以将环从臂上推到桩 |
组件和功能#
组件或功能 |
使用 |
API 文档 |
|---|---|---|
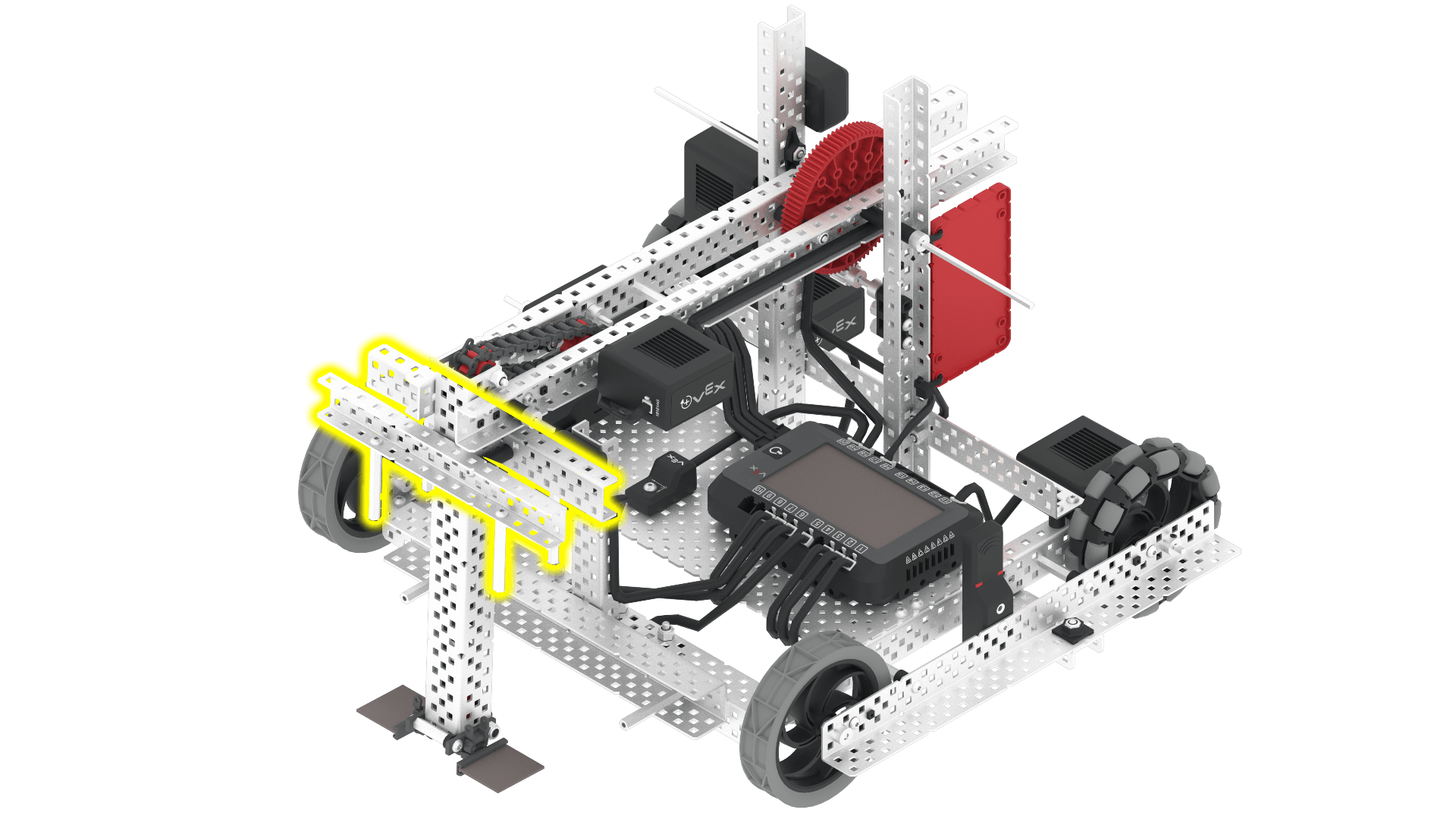
传动系统 |
移动和转向机器人。 |
|
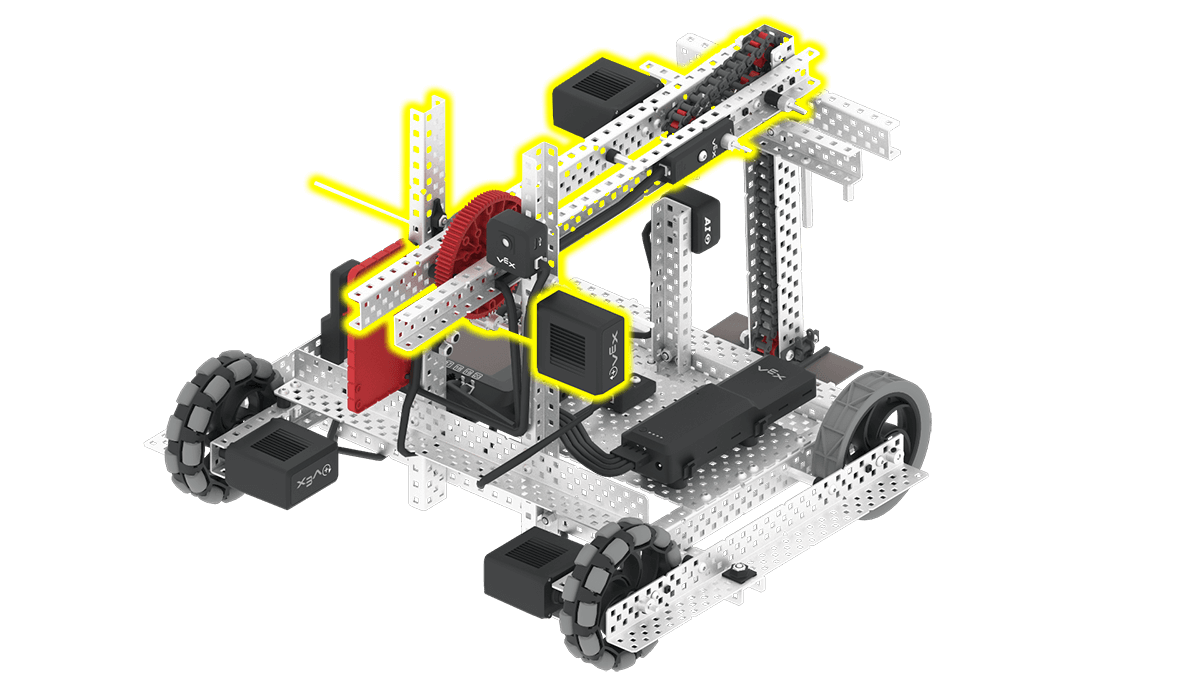
机械臂 |
升降机械臂以操控游戏对象。机械臂必须抬起,以免遮挡人工智能视觉传感器,并能将圆环推到桩柱上。要将机械臂抬升到足以将圆环推到桩柱上的高度,机械臂必须至少抬升 310 度。 |
|
推杆电机 |
推动推杆沿臂向下移动。这样可以将环从臂上推到桩上。推杆在臂顶的位置为 0 度。要将环从臂上推下,推杆电机必须下降 780 度。 |
|
AI视觉传感器 |
检测游戏对象,使机器人能够自主调整方向。 |
|
距离传感器 |
返回物体距离机器人前端的距离。 |
|
光学传感器 |
检测机器人前方的物体并确定其颜色。 |
|
旋转传感器 |
返回推杆电机的当前旋转角度和位置。 |
|
GPS传感器 |
返回机器人当前在游乐场上的位置和方向。 |
|
脑力计时器 |
记录项目启动以来经过的时间。 |
游乐场#
操场 |
描述 |
|---|---|
在 V5RC 24-25 虚拟技能赛场上得分环和移动目标。 |