IQ Slapshot (Instantánea)#
Snapshot es el VEX IQ Hero Bot utilizado en el VIQRC 22-23 Slapshot Playground.
Descripción general del robot#
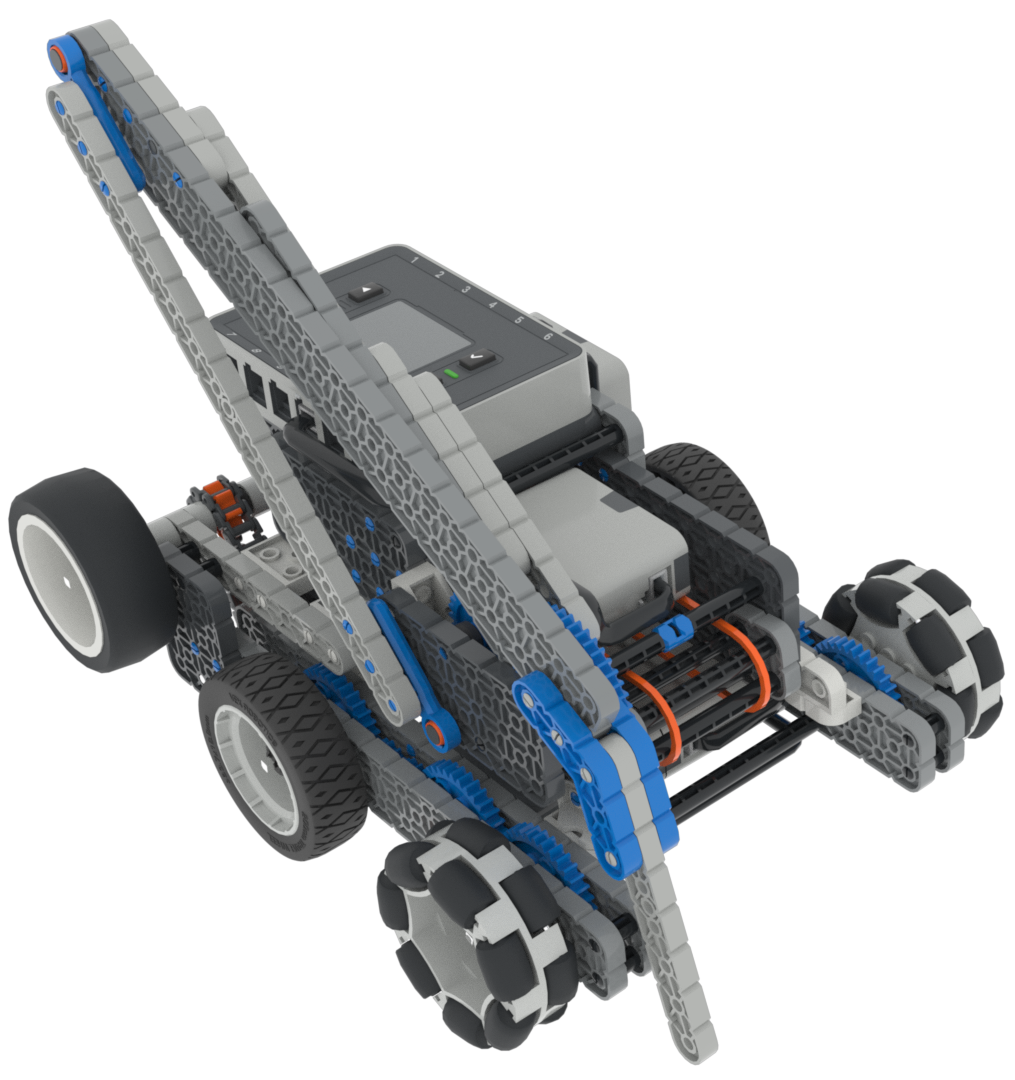
Snapshot admite controles y sensores de realidad virtual estándar, como el Brain Timer, con características adicionales específicas de Snapshot que se tratan en Bloques específicos del robot y Python específico del robot.
Motores#
Configuración y nombre del comando Python |
Descripción |
|---|---|
|
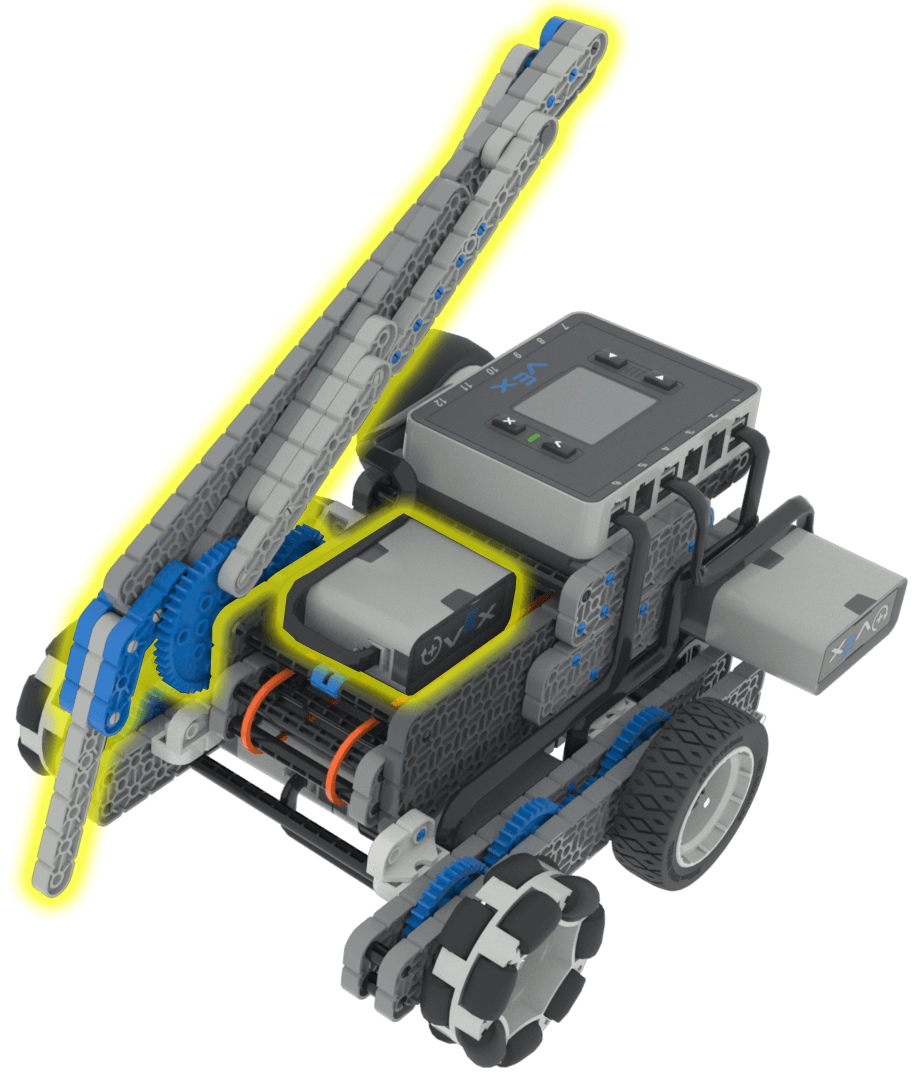
El brazo permite al robot liberar discos de algunos de los dispensadores y alcanzar la zona de contacto al final de un partido por encima de la barrera. |
|
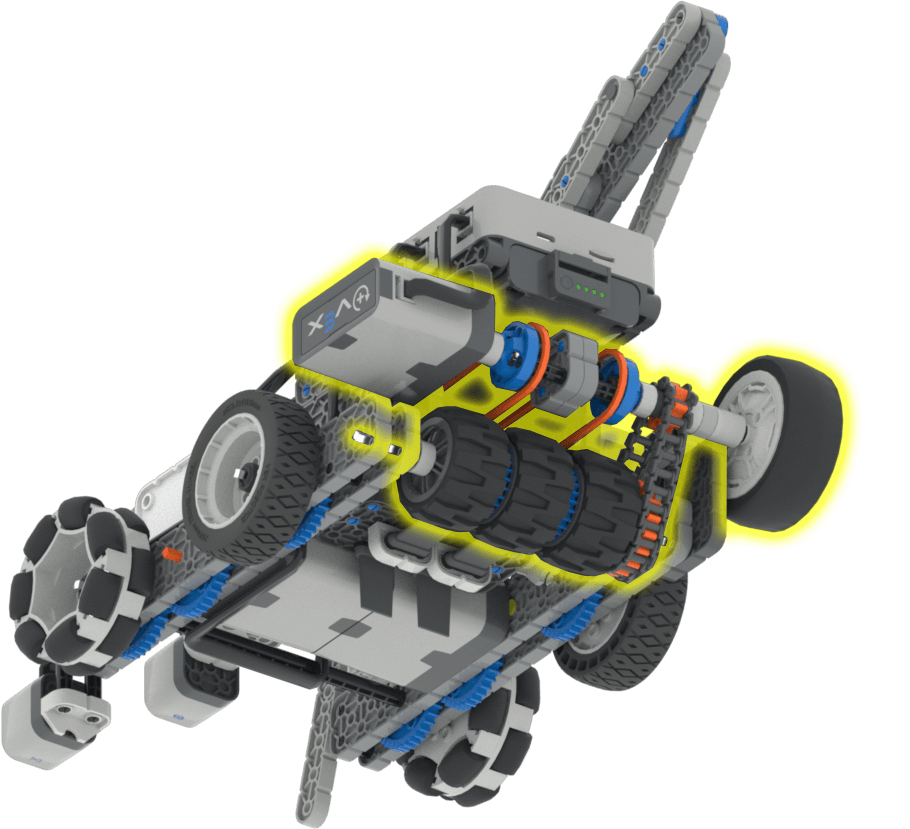
El sistema de entrada permite al robot recoger discos o, en sentido inverso, expulsarlos y marcarlos. El motor de entrada arranca a 0 grados y recoge un disco al girar 180 grados hacia adelante, y marca o deja caer un disco al girar 180 grados hacia atrás. |
Componentes y características#
Componente o característica |
Usar |
Documentación de la API |
|---|---|---|
Tren de transmisión |
Mueve y gira el robot. |
|
Motor del brazo |
Eleva y baja el brazo. Esto permite al robot liberar discos de algunos dispensadores y alcanzar la zona de contacto al final de la partida, por encima de la barrera. |
|
Motor de admisión |
Hace girar las dos ruedas delanteras del robot. Esto permite recoger los discos del suelo. |
|
Interruptor del parachoques de admisión |
Detecta cuándo se carga un disco en la entrada. |
|
Sensor de distancia delantero |
Detecta la distancia a la que se encuentra un disco de la parte frontal del robot. |
|
Sensor óptico frontal |
Detecta si hay un disco en la entrada. |
|
Temporizador cerebral |
Registra el tiempo transcurrido desde que comenzó el proyecto. |
parques infantiles#
Patio de juegos |
Descripción |
|---|---|
Recoge y puntúa discos en el campo de habilidades virtuales VIQRC 22-23. |