V5 Empuje hacia atrás (Dex)#
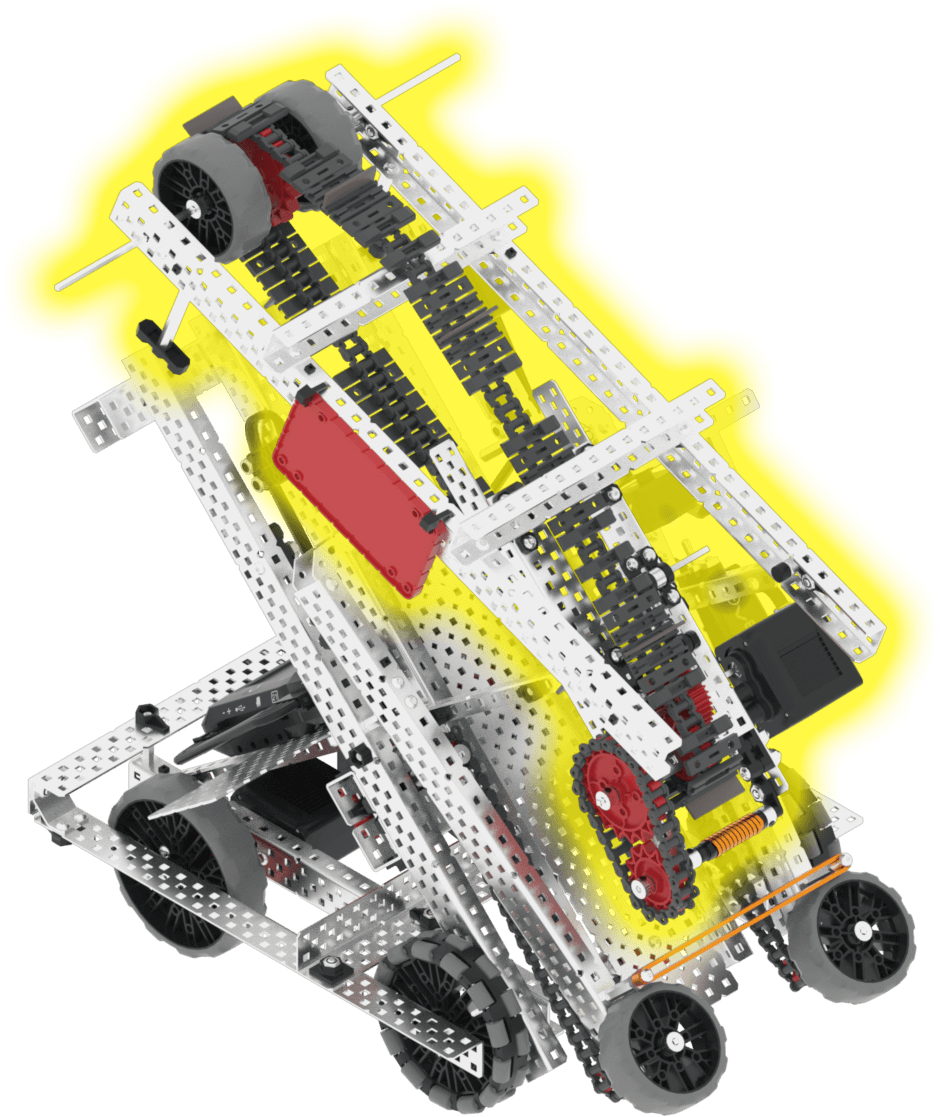
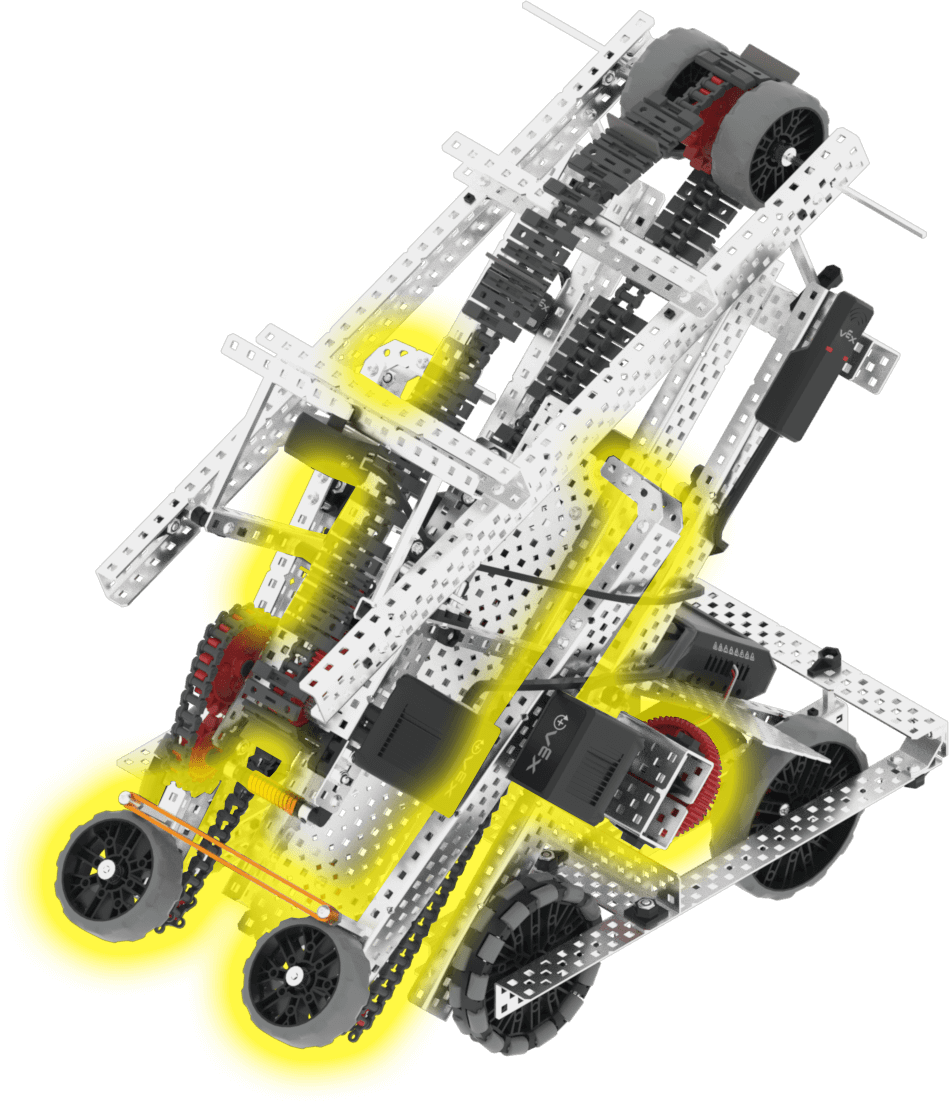
Dex es el robot héroe VEX V5 utilizado en el V5RC 25-26 Push Back Playground.
Descripción general del robot#
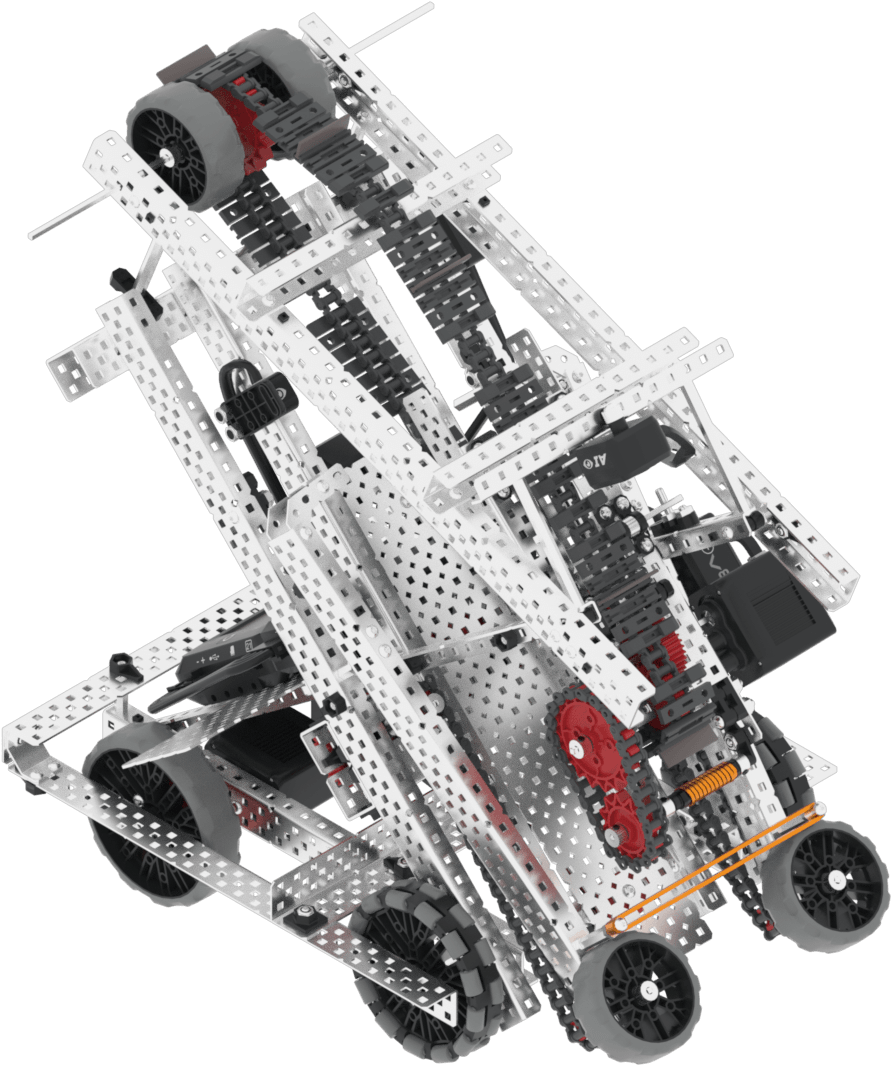
Dex admite controles y sensores de realidad virtual estándar, como el sensor inercial y el temporizador cerebral, con características adicionales específicas de Dex que se tratan en Bloques específicos del robot y Python específico del robot.
Motores#
Configuración y nombre del comando Python |
Descripción |
|---|---|
|
The conveyor motor moves Blocks from the intake up to the top of the robot so the Block can be pushed into a goal. |
|
The intake motor rotates the two wheels at the front of the robot. This allows Blocks to be picked up off the ground. |
Componentes y características#
Componente o característica |
Usar |
Documentación de la API |
|---|---|---|
Tren de transmisión |
Mueve y gira el robot. |
|
Motor transportador |
Mueve los bloques desde la entrada hasta la parte superior del robot para que el bloque pueda ser empujado hacia una meta. |
|
Motor de admisión |
Hace girar las dos ruedas delanteras del robot. Esto permite recoger los bloques del suelo. |
|
Sensor de visión con IA |
Detecta los objetos del juego para que el robot pueda orientarse de forma autónoma. |
|
Interruptor de parachoques |
Detecta cuándo un bloque ha pasado por la entrada y ahora se encuentra en la cinta transportadora. |
|
Sensor de distancia |
Detecta la distancia a la que se encuentra la parte frontal del robot de un objeto. |
|
Sensor óptico |
Detecta el color del bloque situado en la parte superior de la cinta transportadora. |
|
Sensor GPS |
Devuelve la posición y la dirección actuales del robot en el área de juego. |
|
Temporizador cerebral |
Registra el tiempo transcurrido desde que comenzó el proyecto. |
parques infantiles#
Patio de juegos |
Descripción |
|---|---|
Empuja los bloques rojos y azules hacia las porterías en el campo de habilidades virtuales V5RC 25-26. |