V5 Punto de inflexión (Moby)#
Moby es el robot héroe VEX V5 utilizado en el V5RC 21-22 Tipping Point Playground.
Descripción general del robot#
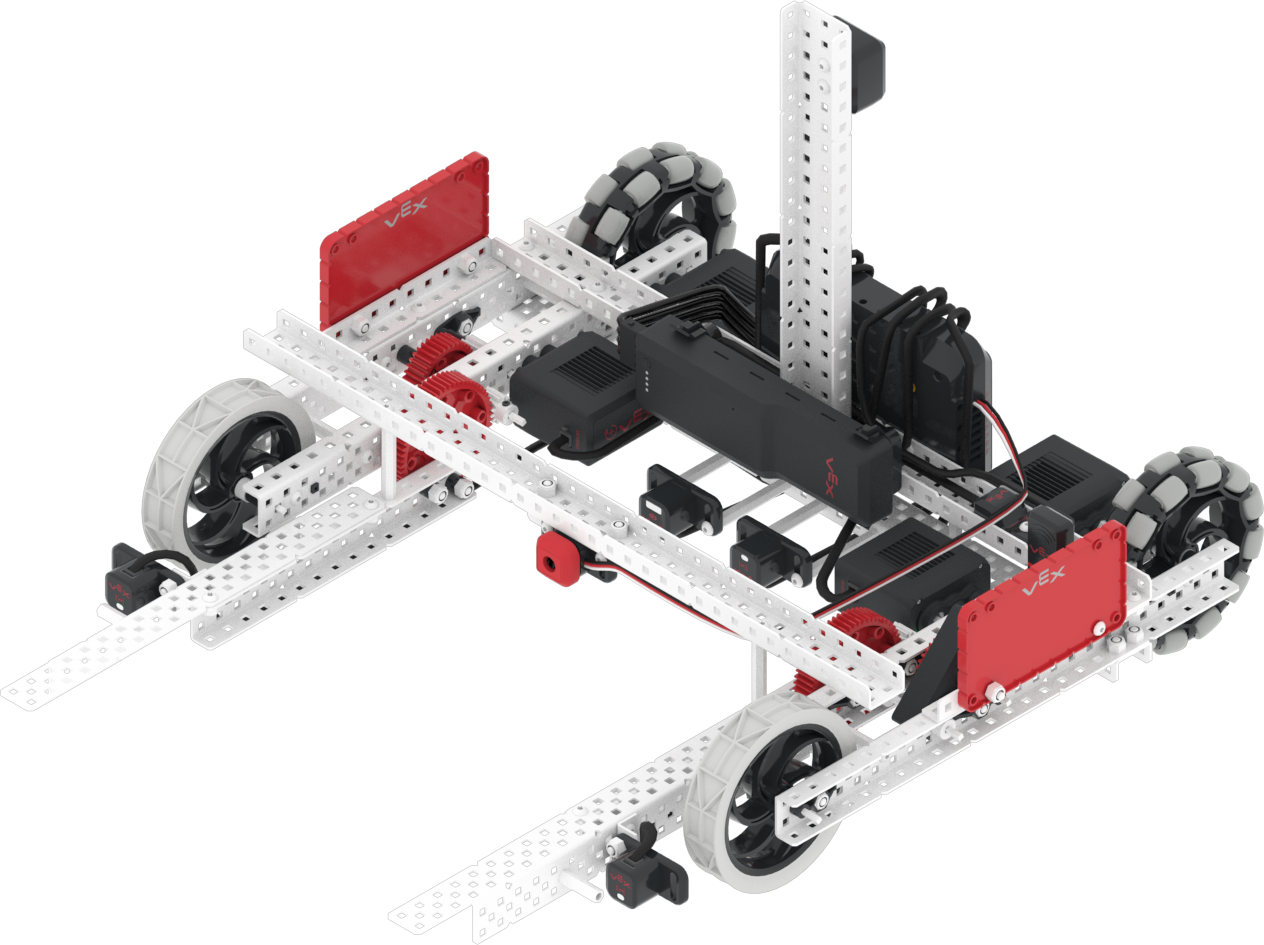
Moby admite controles y sensores de realidad virtual estándar, como el sensor inercial y el temporizador cerebral, con características adicionales específicas de Moby que se tratan en Bloques específicos del robot y Python específico del robot.
Grupos de motores#
Configuración y nombre del comando Python |
Descripción |
|---|---|
|
Las horquillas se pueden subir y bajar. Esto permite al robot transportar y marcar aros y porterías móviles. La posición predeterminada del grupo motor de las horquillas es de 0 grados y se bajará hacia el suelo a 1700 grados. |
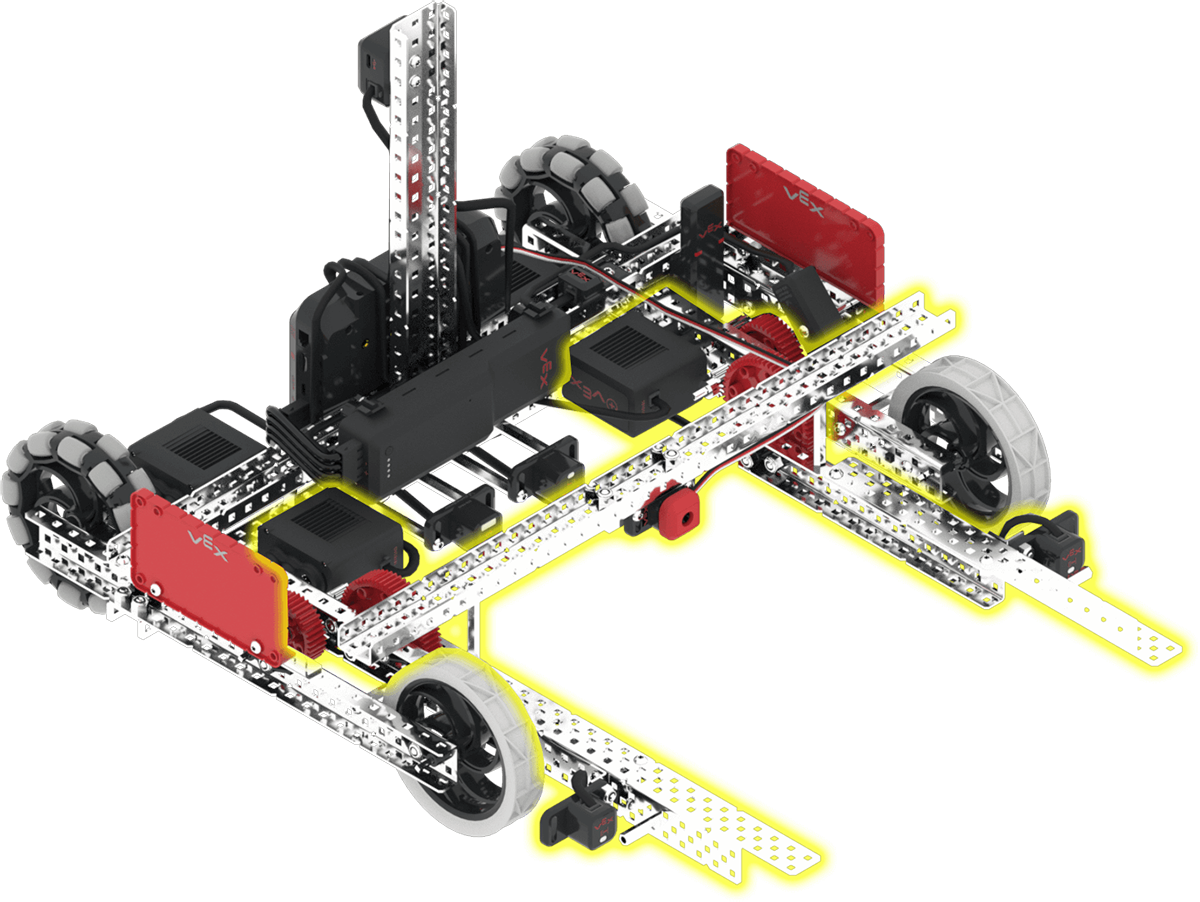
Componentes y características#
Componente o característica |
Usar |
Documentación de la API |
|---|---|---|
Tren de transmisión |
Mueve y gira el robot. |
|
Motor de horquilla |
Sube y baja las horquillas. Esto permite al robot transportar y marcar aros y porterías móviles. |
|
Interruptor de parachoques |
Detecta cuándo hay un anillo en las horquillas. |
|
Sensor óptico |
Detecta anillos entre las horquillas del robot. |
|
Sensor de rotación |
Devuelve el ángulo de las horquillas. |
|
Sensor de distancia |
Indica la distancia a la que se encuentra un objeto de la parte frontal del robot. |
|
Sensor GPS |
Devuelve la posición y la dirección actuales del robot en el área de juego. |
|
Temporizador cerebral |
Registra el tiempo transcurrido desde que comenzó el proyecto. |
parques infantiles#
Patio de juegos |
Descripción |
|---|---|
Consigue goles móviles, anillos y elevaciones de plataforma en el campo de habilidades virtuales V5RC 21-22. |