惯性传感#
要使惯性传感器块出现在 VEXcode V5 中,必须在设备窗口中配置惯性传感器。
有关惯性传感器如何工作的信息,请阅读使用 VEX V5 的惯性传感器
加速#
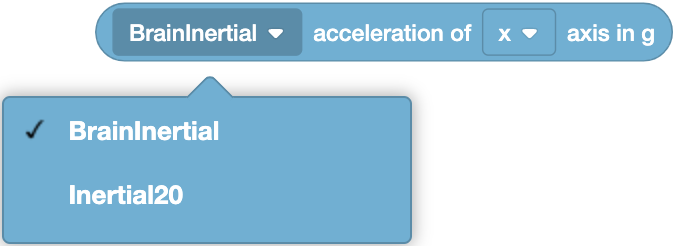
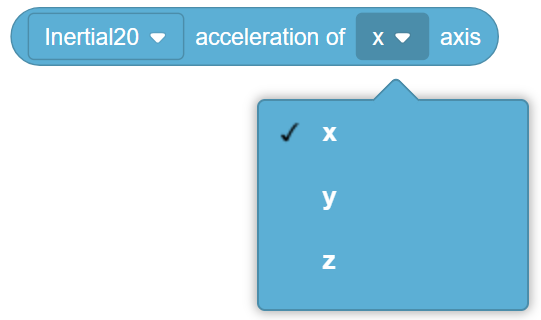
加速度块用于报告惯性传感器上某个轴(x、y 或 z)的加速度值。
([Inertial 20 v] [X v] 轴加速度值)
加速度块报告的范围是从 -4.0 到 4.0 Gs。
选择要使用的陀螺仪/惯性传感器。
选择要使用的轴:
x - 当惯性传感器从向前移动到向后时,X 轴报告加速度。
y - 当惯性传感器左右移动时,Y 轴报告加速度。
z - 当惯性传感器从上向下移动时,Z 轴报告加速度。
在这个例子中,传动系统将向前移动并在移动时打印其当前的 X 轴加速度。
当开始
[Drive forward for 1 second.]
驱动 [向前 v]
等待 (1) 秒
[Print the X-axis acceleration while the Drivetrain is moving.]
在 ([BrainInertial v] [X v] 轴加速度值) 上打印 [Brain v] ◀ 并设定光标为下一行
陀螺仪速率#
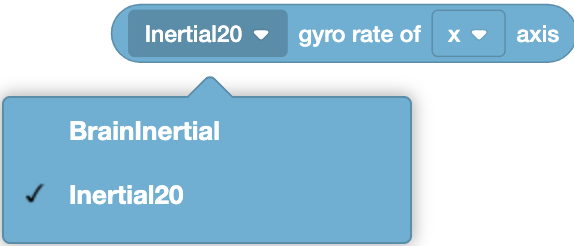
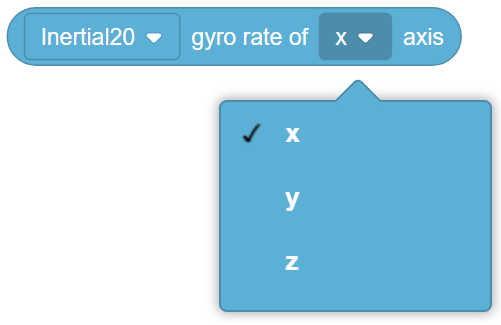
陀螺仪速率 模块用于报告惯性传感器上某个轴(x、y 或 z)的旋转速率。
([Inertial 20 v] [X v] 轴陀螺仪角速度)
陀螺仪速率块报告的范围是 -1000.0 到 1000.0 dps(度/秒)。
选择要使用的陀螺仪/惯性传感器。
选择要使用的轴:
x - 当惯性传感器在 X 轴上旋转时,X 轴报告旋转速率(基于传感器的方向)。
y - 当惯性传感器在 Y 轴上旋转时,Y 轴报告旋转速率(基于传感器的方向)。
z - 当惯性传感器在 Z 轴上旋转时,Z 轴报告旋转速率(基于传感器的方向)。
在这个例子中,传动系统将向右转动并在转动时打印其当前的 X 轴陀螺仪速率。
当开始
[Turn towards the right 1 second.]
[右 v] 转
等待 (1) 秒
[Print the X-axis gyro rate while the Drivetrain is turning.]
在 ([BrainInertial v] [X v] 轴加速度值) 上打印 [Brain v] ◀ 并设定光标为下一行
方向#
方向块用于报告惯性传感器的方向角。
([Inertial 20 v] [横滚 v] 偏转角度值)
选择要使用的陀螺仪/惯性传感器。
选择要使用的方向:
roll - Y 轴表示滚动,报告 -180 度到 +180 度之间的值。
pitch - X 轴代表俯仰,报告 -90 度到 +90 度之间的值。
偏航 - Z 轴表示偏航,报告的值在 -180 度到 +180 度之间。
在这个例子中,传动系统将向右转动并在转动时打印其当前卷。
当开始
[Turn towards the right for 1 second.]
[右 v] 转
等待 (1) 秒
[Print the roll while the Drivetrain is turning.]
在 ([BrainInertial v] [横滚 v] 偏转角度值) 上打印 [Brain v] ◀ 并设定光标为下一行