测距仪传感#
要使测距仪传感器块出现在 VEXcode V5 中,必须在设备窗口中配置 3 线超声波测距仪传感器。
有关详细信息,请参阅以下文章:
测距仪发现物体了吗?#
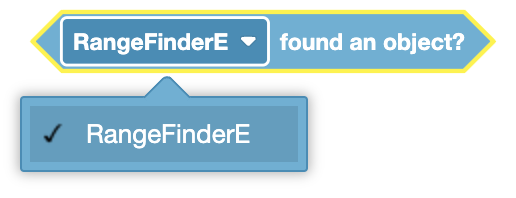
测距仪发现物体? 块用于报告超声波测距仪传感器是否在其视野范围内看到物体。
<[RangeFinderE v] 发现对象?>
当超声波测距仪传感器在其视野范围内看到物体或表面时,**测距仪找到物体?**块会报告“True”。
当超声波测距仪传感器未检测到物体或表面时,**测距仪找到物体?**块会报告“False”。
选择要使用的超声波测距仪传感器。
在这个例子中,每隔 0.25 秒,测距仪就会检查是否检测到物体,如果是,就会将物体与物体之间的距离打印到大脑的屏幕上。
当开始
永久循环
清除 [Brain v] 所有行
在Brain设定光标至 (1) 行 (1) 列
[Check if the Range Finder found an object.]
如果 <[RangeFinderE v] 发现对象?> 那么
[Print the distance to the object.]
在 ([RangeFinderE v] 距离 [毫米 v]) 上打印 [Brain v] ◀ 并设定光标为下一行
结束
[Repeat the process every .25 seconds.]
等待 (0.25) 秒
结束
测距仪距离#
测距仪距离块用于报告距离超声波测距仪传感器最近的物体的距离。
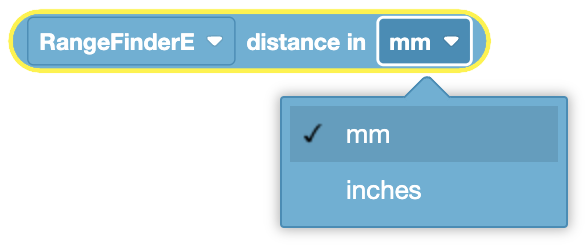
([RangeFinderE v] 距离 [毫米 v])
选择要使用的超声波测距仪传感器。
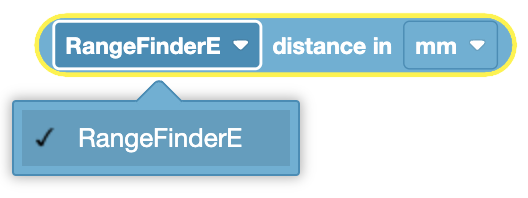
选择报告的单位:毫米 (mm) 或 英寸。
在这个例子中,每隔 0.25 秒,测距仪就会检查是否检测到物体,如果是,就会将物体与物体之间的距离打印到大脑的屏幕上。
当开始
永久循环
清除 [Brain v] 所有行
在Brain设定光标至 (1) 行 (1) 列
[Check if the Range Finder found an object.]
如果 <[RangeFinderE v] 发现对象?> 那么
[Print the distance to the object.]
在 ([RangeFinderE v] 距离 [毫米 v]) 上打印 [Brain v] ◀ 并设定光标为下一行
结束
[Repeat the process every .25 seconds.]
等待 (0.25) 秒
结束