Detección inercial#
Para que los bloques de sensor inercial aparezcan en VEXcode V5, se debe configurar un sensor inercial en la ventana Dispositivos.
Para obtener información sobre cómo funcionan los sensores inerciales, lea Uso del sensor inercial con VEX V5
Aceleración de#
El bloque Aceleración de se utiliza para informar el valor de aceleración de uno de los ejes (x, y o z) en el sensor inercial.
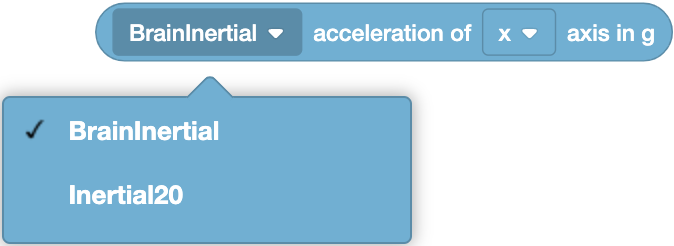
([Inertial 20 v] aceleración de [incógnita v] eje en g)
El bloque Aceleración de informa un rango de -4,0 a 4,0 Gs.
Elija qué sensor giroscópico/inercial utilizar.
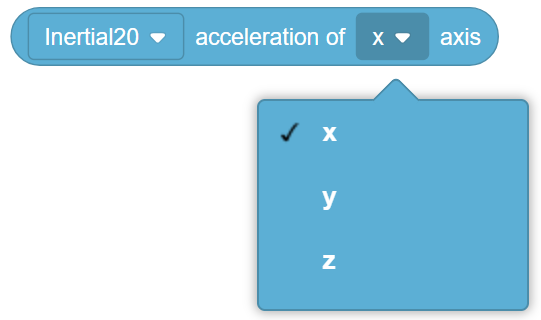
Elija qué eje utilizar:
x - El eje X informa la aceleración cuando el sensor inercial se mueve hacia adelante y hacia atrás.
y - El eje Y informa la aceleración cuando el sensor inercial se mueve de lado a lado.
z - El eje Z informa la aceleración cuando el sensor inercial se mueve hacia arriba y hacia abajo.
En este ejemplo, el tren motriz se moverá hacia adelante e imprimirá su aceleración actual en el eje X mientras se mueve.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print the X-axis acceleration while the Drivetrain is moving.]
imprimir ([BrainInertial v] aceleración de [incógnita v] eje en g) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Tasa de giro de#
El bloque Velocidad de giro se utiliza para informar la velocidad de rotación de uno de los ejes (x, y o z) en el sensor inercial.
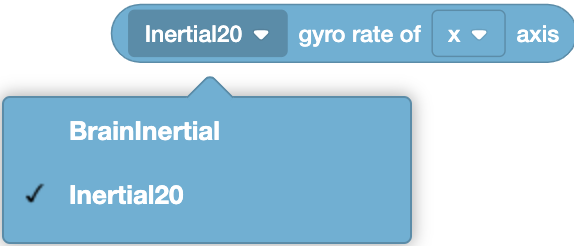
([Inertial 20 v] velocidad de giro de [incógnita v] eje en dps)
El bloque Gyro Rate of informa un rango de -1000.0 a 1000.0 en dps (grados por segundo).
Elija qué sensor giroscópico/inercial utilizar.
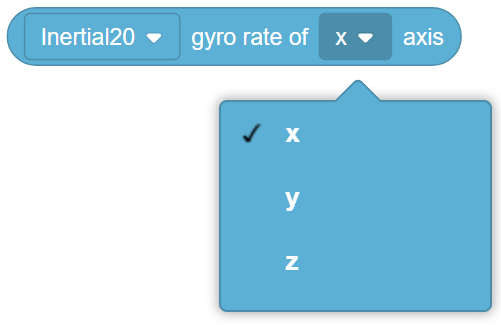
Elija qué eje utilizar:
x - El eje X informa la velocidad de rotación cuando el sensor inercial gira en el eje X (según la orientación del sensor).
y - El eje Y informa la velocidad de rotación cuando el sensor inercial gira en el eje Y (según la orientación del sensor).
z - El eje Z informa la velocidad de rotación cuando el sensor inercial gira en el eje Z (según la orientación del sensor).
En este ejemplo, el tren motriz girará hacia la derecha e imprimirá su velocidad de giro del eje X actual mientras gira.
cuando empezó
[Turn towards the right 1 second.]
turno [derecha v]
esperar (1) segundos
[Print the X-axis gyro rate while the Drivetrain is turning.]
imprimir ([BrainInertial v] aceleración de [incógnita v] eje en g) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Orientación de#
El bloque Orientación de se utiliza para informar el ángulo de orientación del sensor inercial.
([Inertial 20 v] orientación de [rollo v] en grados)
Elija qué sensor giroscópico/inercial utilizar.
Elija qué orientación utilizar:
roll - El eje Y representa el balanceo, que indica un valor entre -180 y +180 grados.
paso - El eje X representa el paso, que indica un valor entre -90 y +90 grados.
guiñada - El eje Z representa la guiñada, que informa un valor entre -180 y +180 grados.
En este ejemplo, el tren motriz girará hacia la derecha e imprimirá su dirección actual a medida que gira.
cuando empezó
[Turn towards the right for 1 second.]
turno [derecha v]
esperar (1) segundos
[Print the roll while the Drivetrain is turning.]
imprimir ([BrainInertial v] orientación de [rollo v] en grados) en [Brain v] ◀ y coloque el cursor en la siguiente fila