旋转感应#
要使旋转传感器块出现在 VEXcode V5 中,必须在设备窗口中配置旋转传感器。
有关详细信息,请参阅以下文章:
设置旋转传感器位置#
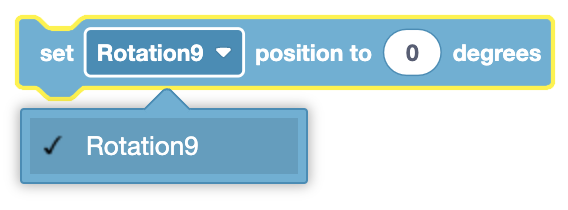
设置旋转传感器位置块用于将旋转传感器的当前位置设置为定义值。
设定 [Rotation 9 v] 位置为 (0) 度
设置旋转传感器位置块接受任何正或负的十进制数或整数。
选择要使用的旋转传感器。
在此示例中,旋转传感器将打印其起始位置,将其位置设置为 -100 度,然后打印新位置。
当开始
在 ([Rotation 9 v] 转位 [度 v] :: custom-sensing) 上打印 [Brain v] ◀ 并设定光标为下一行
设定 [Rotation 9 v] 位置为 (-100) 度
在 ([Rotation 9 v] 转位 [度 v] :: custom-sensing) 上打印 [Brain v] ◀ 并设定光标为下一行
旋转传感器角度#
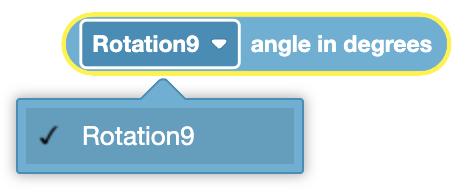
旋转传感器角度块用于报告旋转传感器当前的旋转角度(以度为单位)。
([Rotation 9 v] 角度值)
旋转传感器角度块报告的值范围为 0.00 到 359.99。
选择要使用的旋转传感器。
在此示例中,旋转传感器将打印其起始旋转。
当开始
在 ([Rotation 9 v] 角度值) 上打印 [Brain v] ◀ 并设定光标为下一行
旋转传感器位置#
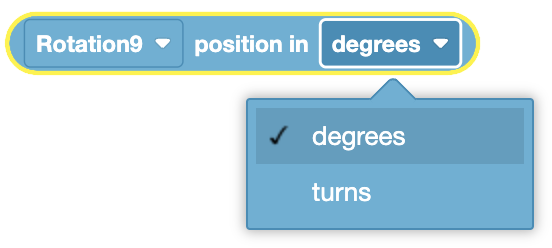
旋转传感器位置块用于报告所选旋转传感器的当前旋转位置。
([Rotation 9 v] 转位 [度 v] :: custom-sensing)
选择要使用的旋转传感器。
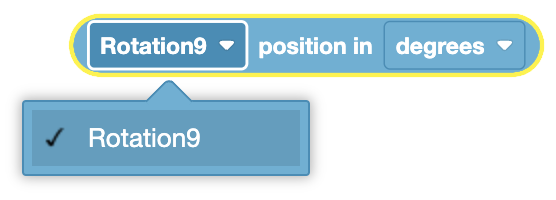
选择报告位置的单位:度或圈。
在此示例中,旋转传感器将打印其起始位置,将其位置设置为 -100 度,然后打印新位置。
当开始
在 ([Rotation 9 v] 转位 [度 v] :: custom-sensing) 上打印 [Brain v] ◀ 并设定光标为下一行
设定 [Rotation 9 v] 位置为 (-100) 度
在 ([Rotation 9 v] 转位 [度 v] :: custom-sensing) 上打印 [Brain v] ◀ 并设定光标为下一行
旋转传感器速度#
旋转传感器速度块用于报告旋转传感器的当前速度。
([Rotation 9 v] 速度 [rpm v] 值 :: custom-sensing)
选择要使用的旋转传感器。
选择报告位置的单位:每分钟转数 (rpm) 或 每秒度数 \(dps\)。
在这个例子中,传动系统将向右转动 1 秒,然后其当前转速才会打印在 Brain 的屏幕上。
当开始
[Turn towards the right for 1 second.]
[右 v] 转
等待 (1) 秒
[Print the correct rotational velocity after 1 second.]
在 ([Rotation 9 v] 速度 [rpm v] 值 :: custom-sensing) 上打印 [Brain v] ◀ 并设定光标为下一行