VR漫游车#
VR Rover 用于 Rover 救援游乐场。
机器人概览#
VR Rover 专为 Rover Rescue 环境中的移动、采集和自主感知而设计。
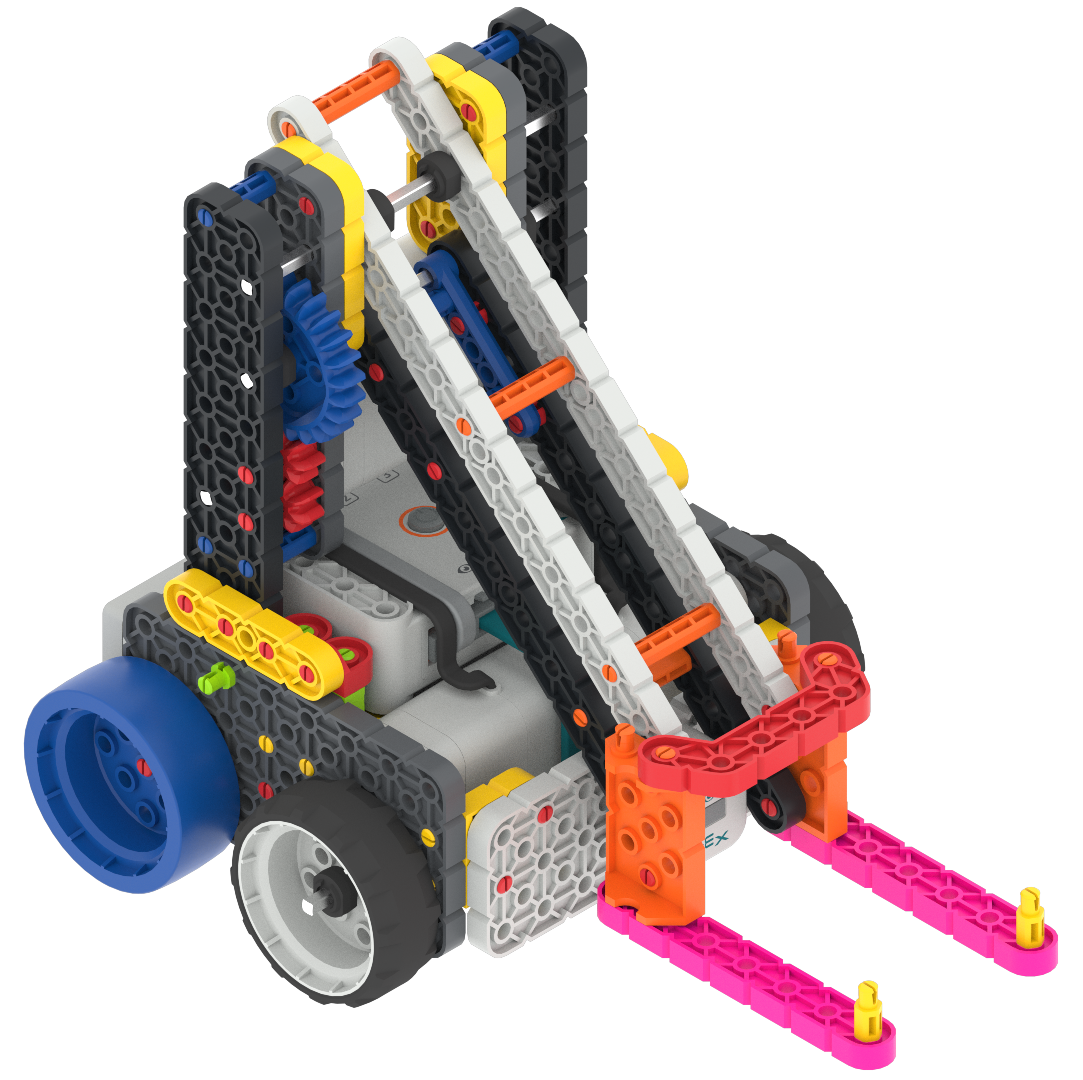
VR Rover 长约 191 毫米,宽约 147 毫米,它使用多功能爪来收集矿物。
组件和功能#
组件或功能 |
使用 |
API 文档 |
|---|---|---|
传动系统 |
移动和转向探测车,内置陀螺仪传感器用于航向控制。 |
|
爪 |
收集和运输矿物。 |
|
距离传感器 |
探测探测车前方最近的物体。 |
|
漫游车传感 |
能够探测和发现矿物、敌人、基地、障碍物和危险。 |
|
脑力计时器 |
跟踪自主行为的时间。 |
这些系统使探测车能够探测附近的矿物和敌人,报告物体的方向和距离,并使用 机器人专用模块 和 机器人专用 Python 对受到攻击或升级做出反应。
游乐场#
操场 |
描述 |
|---|---|
探索外星环境,收集矿物,躲避敌人,并保持探测车的生存。 |