V5 上下(前锋)#
Striker 是 VEX V5 Hero Bot,用于 V5RC 23-24 Over Under Playground。
机器人概览#
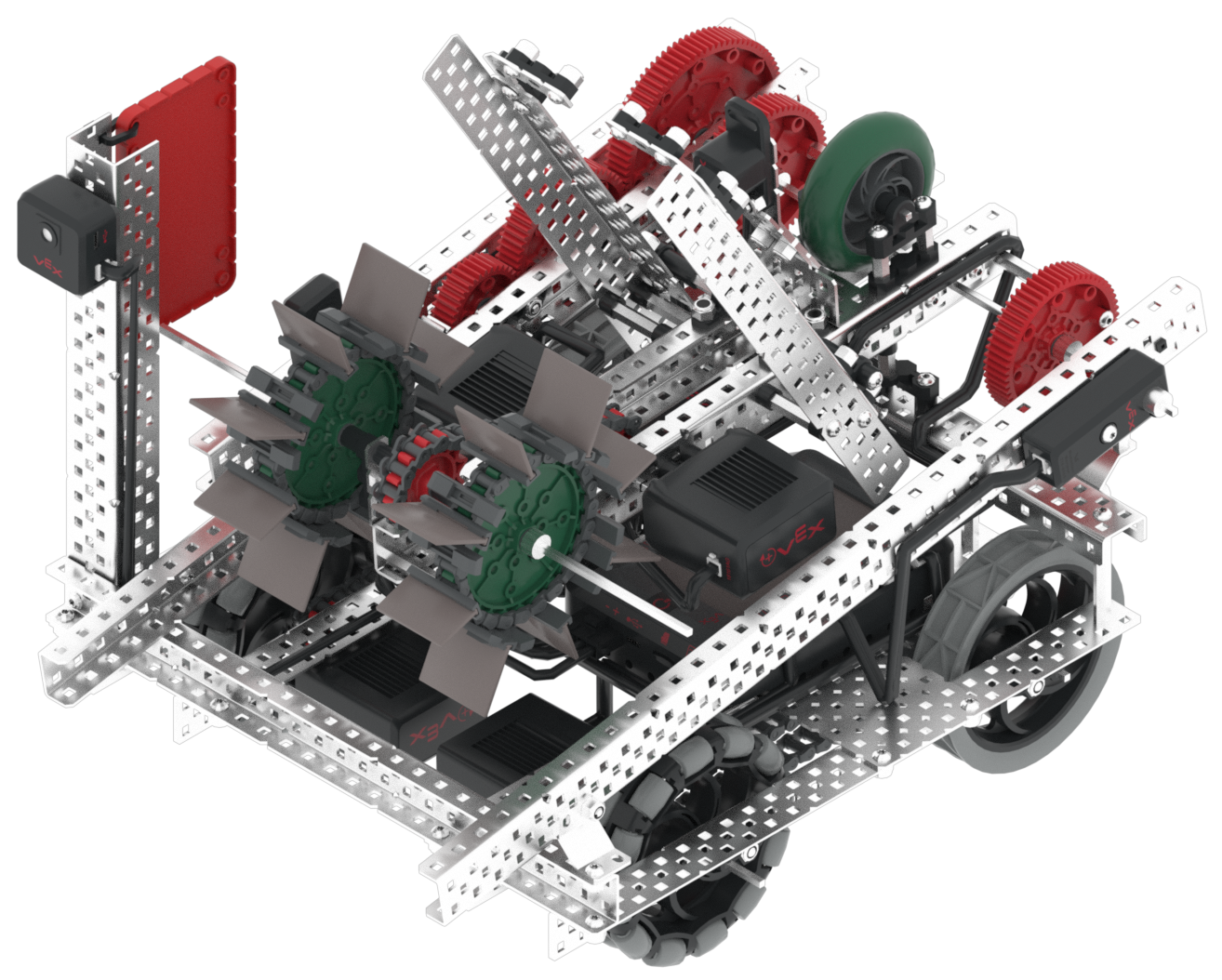
Striker 支持标准 VR 控制和传感器,例如惯性传感器和脑计时器,其他 Striker 特有的功能在 机器人专用模块 和 机器人专用 Python 中有所介绍。
电机#
配置和 |
描述 |
|---|---|
|
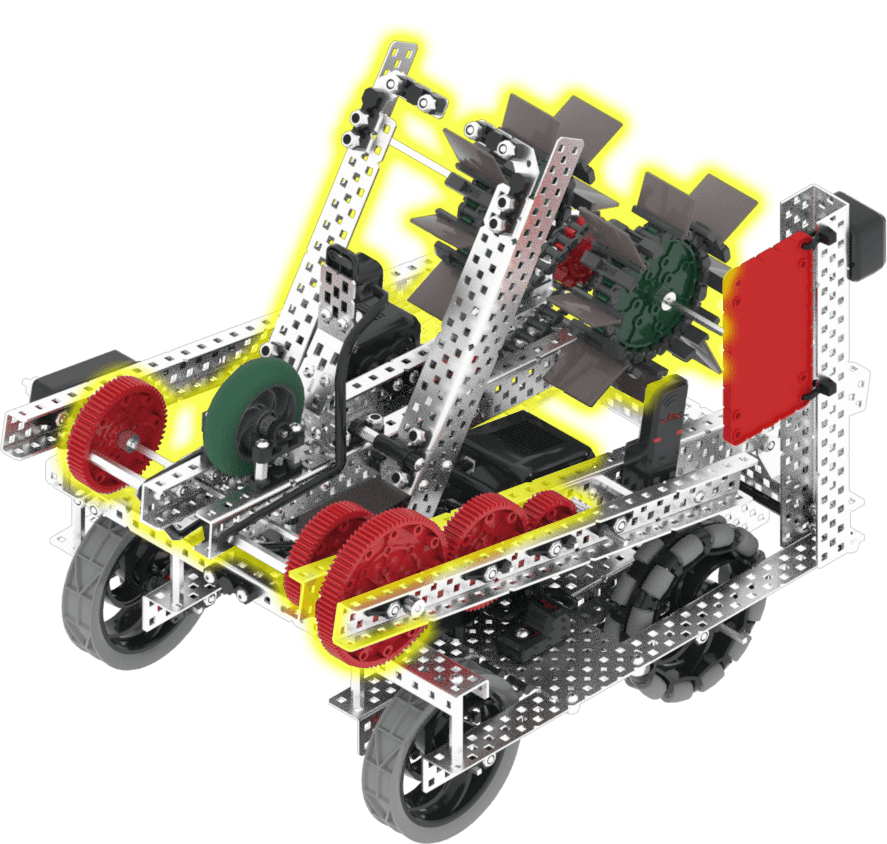
机械臂可以升降,这使得机器人能够执行诸如搬运游戏物品之类的任务。默认情况下,机械臂从0度开始,向前旋转1200度后将完全放下。 |
|
进料口可以正反转,使机器人能够收集和得分游戏物品。进料口正转360度即可收集三球,反转360度则可得分或丢弃三球。 |
组件和功能#
组件或功能 |
使用 |
API 文档 |
|---|---|---|
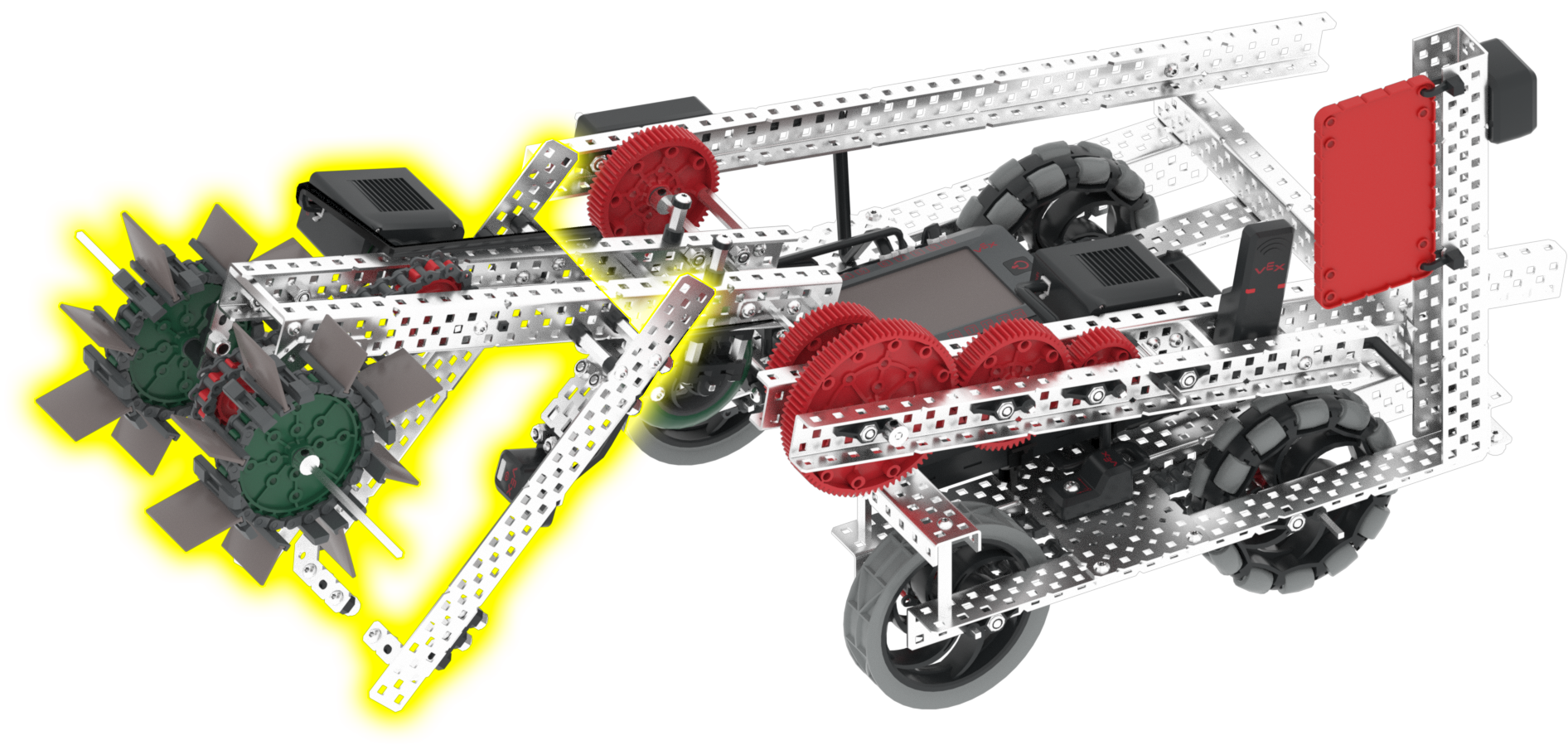
传动系统 |
移动和转向机器人。 |
|
机械臂 |
机械臂可以升降,这使得机器人能够执行诸如搬运游戏物品之类的任务。默认情况下,机械臂从0度开始,向前旋转1200度后将完全放下。 |
|
进气马达 |
进料口可以正反转,使机器人能够收集和得分游戏物品。进料口正转360度即可收集三球,反转360度则可得分或丢弃三球。 |
|
光学传感器 |
检测机器人附近是否有物体以及物体的颜色。 |
|
旋转传感器 |
返回机械臂电机的当前旋转角度和位置。 |
|
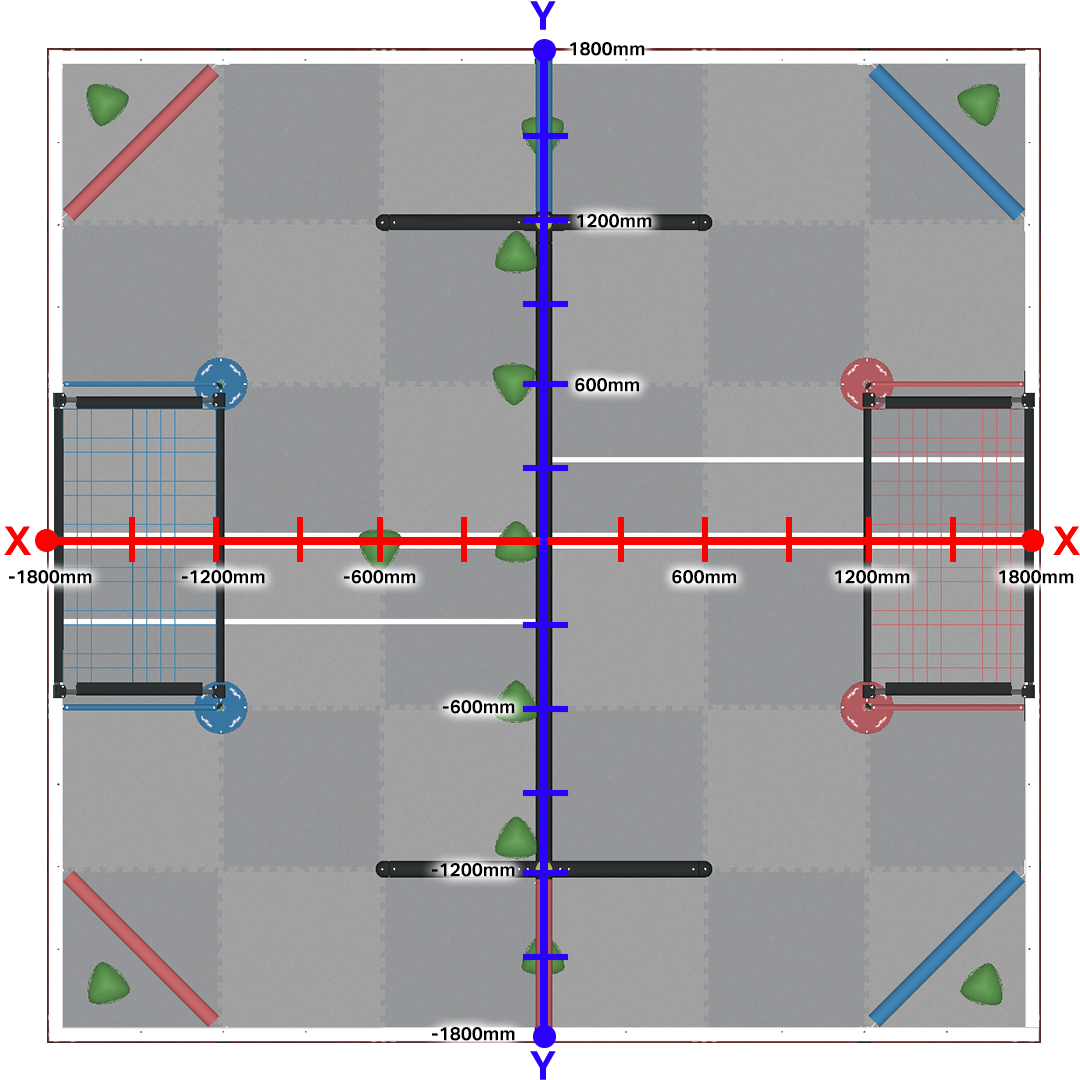
GPS传感器 |
返回机器人当前在游乐场上的位置和方向。 |
|
脑力计时器 |
记录项目启动以来经过的时间。 |
GPS传感器采用笛卡尔坐标系进行导航,场中心位于原点(0,0),并向每个方向延伸1800毫米。
游乐场#
操场 |
描述 |
|---|---|
在 V5RC 23-24 虚拟技能赛场上获得 Triball 分数并提升等级。 |