水下虚拟现实机器人#
水下VR机器人用于珊瑚礁清理游乐场。
机器人概览#
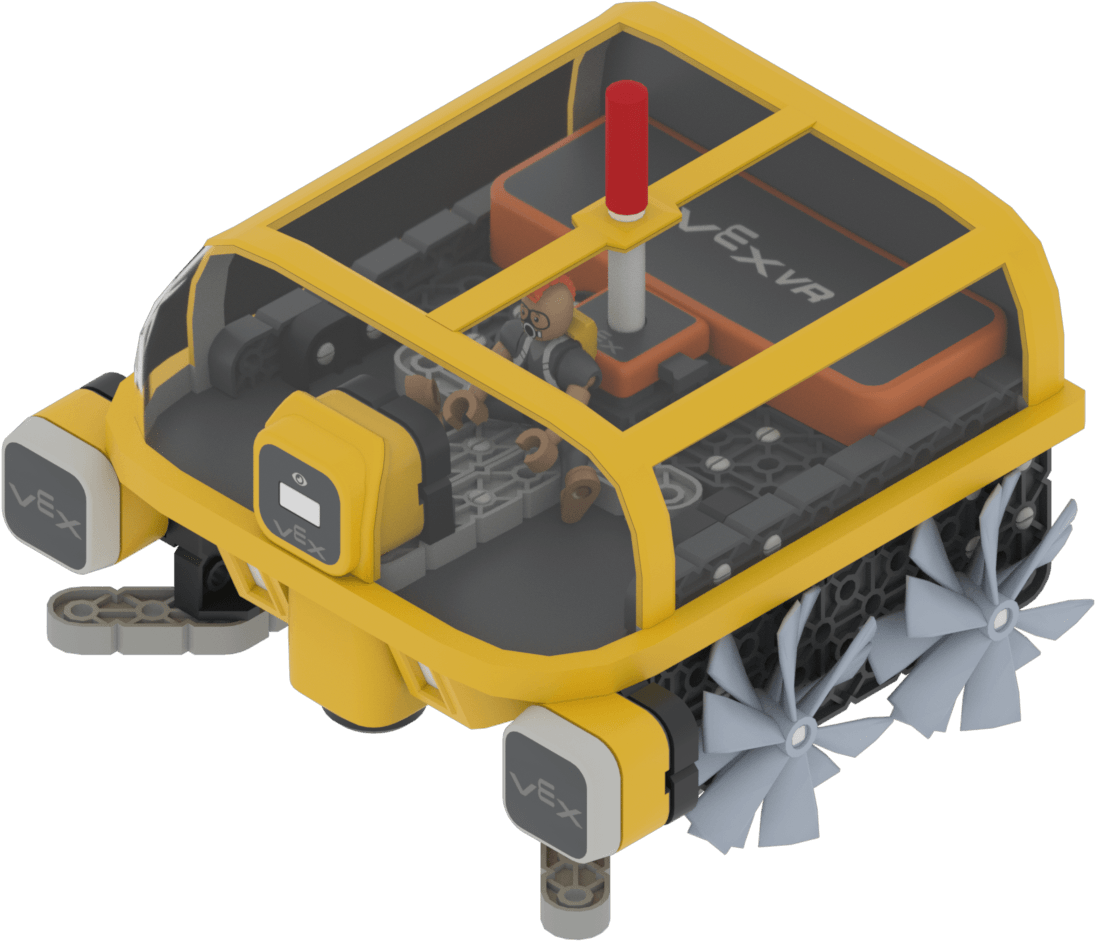
水下VR机器人的工作原理与VR机器人相同,但它被设计成可以在水下环境中操作。
组件和功能#
成分 |
使用 |
API 文档 |
|---|---|---|
传动系统 |
移动和转向机器人。 |
|
电磁铁 |
拾取并丢弃水下垃圾。 |
|
脑力计时器 |
记录项目启动以来经过的时间。 |
|
保险杠传感器 |
检测机器人正面何时与物体接触。 |
|
距离传感器 |
检测机器人前端与物体之间的距离。 |
|
眼部传感器 |
检测机器人前方或下方的任何颜色。 |
|
位置传感器 |
返回机器人当前在游乐场上的位置。 |
游乐场#
操场 |
描述 |
|---|---|
在机器人电池耗尽之前,收集所有垃圾。 |