惯性#
初始化惯性类#
使用以下构造函数创建惯性传感器:
The inertial constructor creates an inertial object using the EXP Brain’s internal Inertial Sensor.
范围 |
描述 |
|---|---|
|
The |
// Create a new object "Inertial" with the
// inertial class.
inertial Inertial = inertial();
The inertial(port, dir) constructor creates an inertial object using the EXP Brain’s internal Inertial Sensor.
范围 |
描述 |
|---|---|
|
A valid |
目录 |
The |
// Construct a Inertial Sensor "Inertial" with the
// inertial class.
inertial Inertial = inertial(PORT1);
This Inertial object will be used in all subsequent examples throughout this API documentation when referring to inertial class methods.
类方法#
calibrate()#
陀螺仪或惯性传感器将根据校准期间 EXP Brain 的方向自动调整其值,以便它在所有可能的 EXP Brain 方向上保持一致。
该方法通过以下方式调用:
The calibrate() method calibrates the Inertial Sensor. Calibration should be done when the Inertial Sensor is not moving. Allow at least 2 seconds for calibration to complete.
**返回:**无。
// Start calibration.
Inertial.calibrate();
The calibrate(value) method calibrates the Inertial Sensor. Calibration should be done when the Inertial Sensor is not moving. Allow at least 2 seconds for calibration to complete.
参数 |
描述 |
|---|---|
|
设置校准时间。默认值为 0。 |
**返回:**无。
// Start calibration with the calibration time set to 3 seconds.
Inertial.calibrate(3);
isCalibrating()#
The isCalibrating() method checks if the Inertial Sensor is currently calibrating.
Returns: true if the Inertial Sensor is calibrating. false if it is not.
// Start calibration.
Inertial.calibrate();
// Print that the Inertial Sensor is calibrating while
// waiting for it to finish calibrating.
while(Inertial.isCalibrating()){
Brain.Screen.clear();
Brain.Screen.print("Inertial Calibrating");
wait(50, msec);
}
resetHeading()#
The resetHeading() method resets the heading of the Inertial Sensor to 0.
**返回:**无。
setHeading()#
The setHeading(value, units) method sets the heading of the Inertial Sensor to a specified value.
参数 |
描述 |
|---|---|
|
要设置的航向值。 |
|
A valid |
**返回:**无。
// Set the Inertial Sensor's heading to 180 degrees.
Inertial.setHeading(180);
heading()#
The heading(units) method returns the current heading of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
**返回:**以指定单位表示惯性传感器当前航向的双精度值。
// Get the current heading for the Inertial Sensor.
double value = Inertial.heading();
resetRotation()#
The resetRotation() method resets the rotation of the Inertial Sensor to 0.
**返回:**无。
setRotation()#
The setRotation(value, units) method sets the rotation of the Inertial Sensor to a specified value.
参数 |
描述 |
|---|---|
|
要设置的旋转值。 |
|
A valid |
**返回:**无。
// Set the Inertial Sensor's rotation to 180 degrees.
Inertial.setRotation(180);
rotation()#
The rotation(units) method returns the current rotation of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
返回: 以指定单位表示惯性传感器当前旋转的双精度值。
// Get the current rotation for the Inertial Sensor.
double value = Inertial.rotation();
angle()#
The angle(units) method returns the current angle of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
**返回:**以指定单位表示惯性传感器当前角度的双精度值。
// Get the current angle for the Inertial Sensor.
double value = Inertial.angle();
roll()#
The roll(units) method returns the roll angle of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
**返回:**表示惯性传感器滚动值的双精度数。
pitch()#
The pitch(units) method returns the roll angle of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
**返回:**表示惯性传感器的俯仰值的双精度数。
yaw()#
The yaw(units) method returns the yaw angle of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
**返回:**表示惯性传感器偏航值的双精度数。
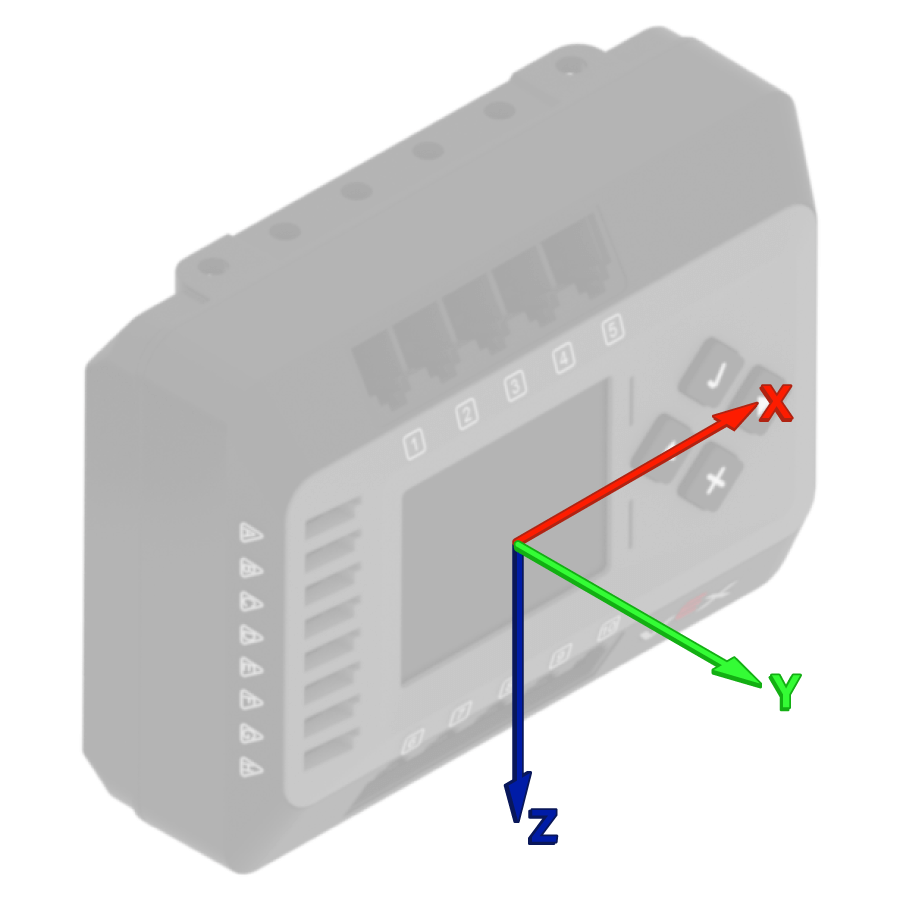
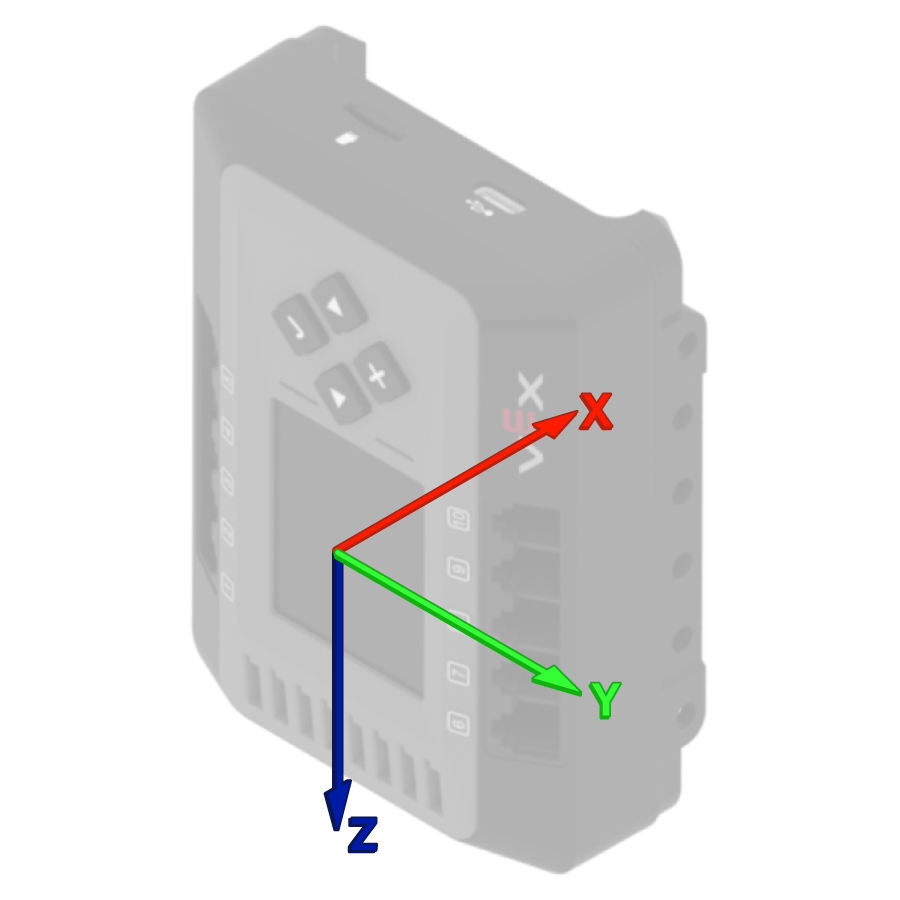
orientation()#
The orientation(axis, units) method returns the orientation for one axis of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
|
A valid |
**返回:**以指定单位表示轴方向的双精度值。
// Get the orientation value for the X axis of the
// Inertial Sensor.
double orient = Inertial.orientation(xaxis);
gyroRate()#
The gyroRate(axis, units) method returns the gyro rate for one axis of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
|
A valid |
**返回:**以指定的单位表示轴的陀螺仪速率的双精度值。
// Get the gyro rate for the Z axis of the Inertial Sensor.
double zrate = Inertial.gyroRate(zaxis);
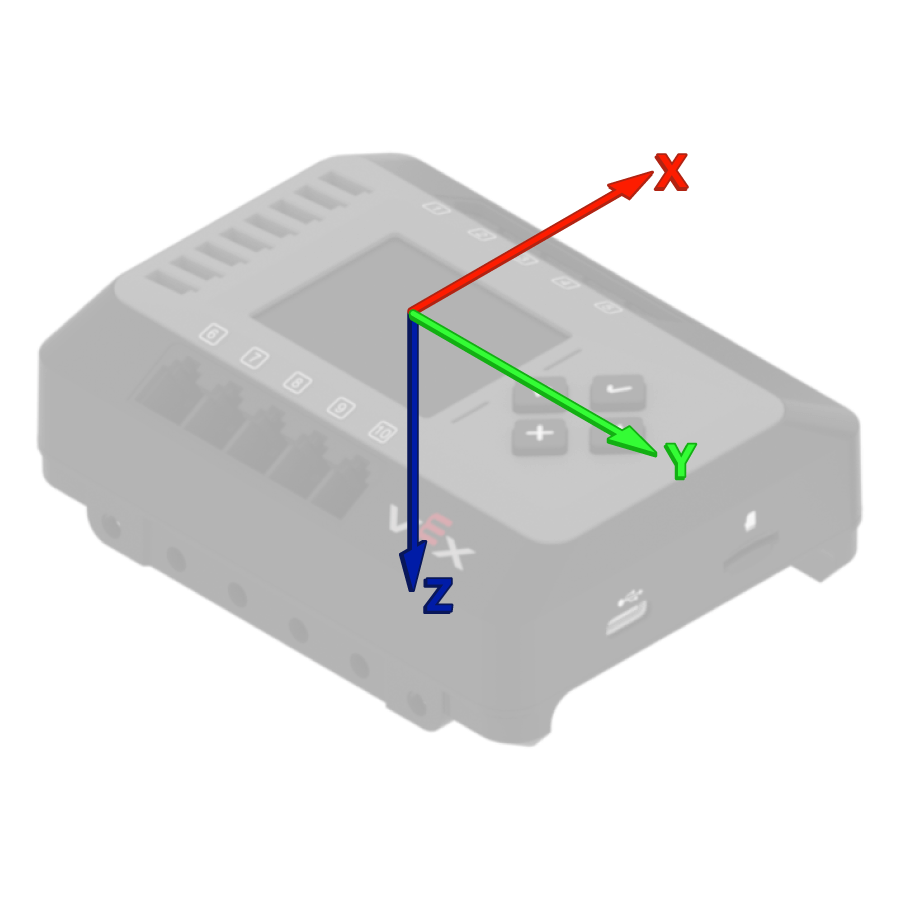
acceleration()#
The acceleration(axis) method returns the acceleration of a specific axis of the Inertial Sensor.
参数 |
描述 |
|---|---|
|
A valid |
**返回:**以重力单位表示轴加速度的双精度值。
// Get the acceleration for the Z axis of the
// Inertial Sensor.
double accel = Inertial.acceleration(zaxis);
// Print the value of the current acceleration of the z-axis
// of the Inertial Sensor to the Brain's screen.
Brain.Screen.print(accel);
changed()#
The changed(callback) method registers a callback function for when the Inertial Sensor heading changes.
参数 |
描述 |
|---|---|
|
当惯性传感器航向改变时调用的回调函数。 |
**返回:**事件类的一个实例。
// Define the inertialChanged function with a void return
// type, showing it doesn't return a value.
void inertialChanged() {
// The brain will print that the Inertial Sensor changed
// on the Brain's screen.
Brain.Screen.print("accelerometer changed");
}
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Turn the robot right.
Drivetrain.turn(right);
// Run inertialChanged when the value of the
// Inertial Sensor changes.
Inertial.changed(inertialChanged);
}
collision()#
The collision(axis, x, y, z) method registers a callback function for when the Inertial Sensor detects a collision.
参数 |
描述 |
|---|---|
|
A valid |
|
x 轴加速度值的双精度数。 |
|
y 轴加速度值的双精度数。 |
|
z 轴加速度值的双精度数。 |
**返回:**事件类的一个实例。
timestamp()#
The timestamp() method requests the timestamp of the last received status packet from the Inertial Sensor.
**返回:**最后一个状态包的时间戳,以毫秒为单位的无符号 32 位整数。
installed()#
The installed() method returns if the Inertial Sensor is installed.
Returns: true if the Inertial Sensor is installed. false if it is not.