Detección de distancia#
Para que los bloques del Sensor de distancia aparezcan en VEXcode V5, se debe configurar un Sensor de distancia en la ventana Dispositivos.
Para obtener más información, consulte estos artículos:
Distancia del objeto#
El bloque Distancia del objeto se utiliza para informar la distancia del objeto más cercano al sensor de distancia.
([Distance 10 v] distancia del objeto en [mm v])
El bloque Distancia del objeto informa un rango de 20 mm a 2000 mm.
Elija qué sensor de distancia utilizar.
Seleccione en qué unidades desea informar: milímetros (mm) o pulgadas.
En este ejemplo, el sensor de distancia informará la distancia actual entre él y el objeto más cercano.
cuando empezó
imprimir ([Distance 10 v] distancia del objeto en [mm v]) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Velocidad del objeto#
El bloque Velocidad del objeto se utiliza para informar la velocidad actual de un objeto en metros por segundo (m/s).
([Distance 10 v] velocidad del objeto en m/s)
Elija qué sensor de distancia utilizar.
En este ejemplo, el sensor de distancia informará la velocidad actual de un objeto que se mueve frente a él.
cuando empezó
imprimir ([Distance 10 v] velocidad del objeto en m/s) en [Brain v] ◀ y coloque el cursor en la siguiente fila
El tamaño del objeto es#
El bloque El tamaño del objeto es se utiliza para informar si el sensor de distancia detecta el tamaño de objeto especificado.
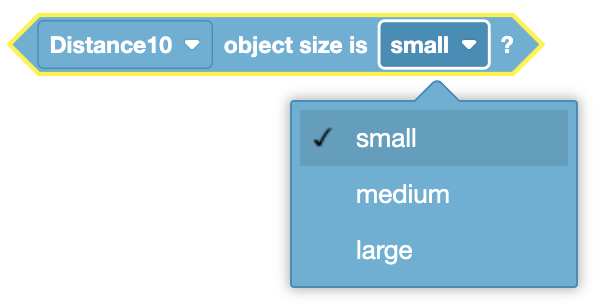
<¿El tamaño del objeto [Distance 10 v] es [pequeño v]?>
El sensor de distancia determina el tamaño del objeto detectado (ninguno, pequeño, mediano, grande) en función de la cantidad de luz reflejada y devuelta al sensor.
El bloque El tamaño del objeto es informa “Verdadero” cuando el sensor de distancia detecta el tamaño especificado.
El bloque El tamaño del objeto es informa “Falso” cuando el sensor de distancia no detecta el tamaño especificado.
Elija qué sensor de distancia utilizar.
Elija el tamaño del objeto que desea que el sensor de objetos verifique.
pequeño
medio
grande
En este ejemplo, si el sensor de distancia detecta un objeto pequeño, avanzará hasta que el objeto sea grande.
cuando empezó
[Check if the Distance Sensor sees a small object .]
si <¿El tamaño del objeto [Distance 10 v] es [pequeño v]?> entonces
[If a small object is detected, drive forward.]
unidad [adelante v]
[Wait until the small detected object is large.]
esperar hasta <¿El tamaño del objeto [Distance 10 v] es [grande v]?>
[When the object size is large, stop driving.]
deja de conducir
fin
Sensor de distancia que encontró objeto#
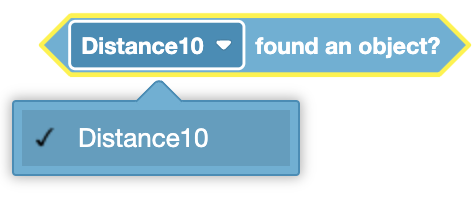
El bloque Objeto encontrado por el sensor de distancia se utiliza para informar si el sensor de distancia ve un objeto dentro de su campo de visión.
<[Distance 10 v] Encontraste un objeto?>
El bloque Objeto encontrado por el sensor de distancia informa “Verdadero” cuando el sensor de distancia detecta un objeto o una superficie dentro de su campo de visión.
El bloque Objeto encontrado por el sensor de distancia informa Falso cuando el sensor de distancia no detecta un objeto o superficie.
Elija qué sensor de distancia utilizar.
En este ejemplo, cuando el sensor de distancia detecta un objeto, imprimirá un mensaje al cerebro.
cuando empezó
[Don't print the message until the Distance Sensor finds an object.]
esperar hasta <[Distance 10 v] Encontraste un objeto?>
imprimir [Distance Sensor has detected an object.] en [Brain v] ◀ y coloque el cursor en la siguiente fila