Detección del tren motriz#
Para que los bloques Drivetrain aparezcan en VEXcode V5, se debe configurar un Drivetrain en la ventana Dispositivos.
Configurar sin giroscopio:
Configuración de un sistema de transmisión de 2 motores (sin giroscopio) en VEXcode V5
Configuración de un sistema de transmisión de 4 motores (sin giroscopio) en VEXcode V5
Configurar con un giroscopio:
Configuración de un sistema de transmisión de 4 motores en VEXcode V5
Configuración de un sistema de transmisión de 4 motores en VEXcode V5
Para obtener información sobre cómo funcionan los sistemas de transmisión, lea Creación de un sistema de transmisión V5.
Calibración del tren motriz#
El bloque Calibrar Tren Motriz se utiliza para calibrar el sensor del tren motriz. Se recomienda utilizar este bloque al inicio del proyecto.
calibrar la transmisión
El tren motriz debe permanecer quieto para que el proceso de calibración, que demora aproximadamente 2 segundos, tenga éxito.
En este ejemplo, el sensor del tren motriz se calibrará durante 2 segundos antes de imprimir el rumbo actual en grados.
cuando empezó
[Calibrate the Drivetrain, wait 2 seconds before doing anything.]
calibrar la transmisión
esperar (2) segundos
imprimir (rumbo de la unidad en grados) en [Brain v] ◀ y coloque el cursor en la siguiente fila
¿La unidad está lista?#
El bloque ¿La unidad está lista? se utiliza para informar si el tren motriz ha completado su movimiento.
<¿La unidad está lista?>
El bloque ¿La unidad está lista? informa Verdadero cuando los motores del tren motriz han completado su movimiento.
El bloque ¿La unidad está lista? informa Falso cuando los motores del tren motriz aún están en movimiento.
¿La unidad se está moviendo?#
El bloque ¿La unidad se está moviendo? se utiliza para informar si el tren motriz se está moviendo actualmente.
<¿La unidad se está moviendo?>
El bloque ¿La unidad se está moviendo? informa Verdadero cuando los motores del tren motriz se están moviendo.
El bloque ¿La unidad se está moviendo? informa Falso cuando los motores del tren motriz no se están moviendo.
Dirección de la unidad#
El bloque Drive Heading se utiliza para informar la dirección en la que se orienta el tren motriz mediante la posición angular actual del sensor inercial.
(rumbo de la unidad en grados)
El bloque Drive Heading informa un rango de 0,0 a 359,99 grados.
En este ejemplo, el tren motriz girará hacia la derecha durante 1 segundo antes de que su rumbo actual se imprima en la pantalla del cerebro.
cuando empezó
[Turn towards the right for 1 second.]
turno [derecha v]
esperar (1) segundos
[Print Drivetrain's current heading after 1 second.]
imprimir (rumbo de la unidad en grados) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Rotación de la unidad#
El bloque Rotación de transmisión se utiliza para informar el ángulo de rotación del tren motriz.
(rotación de la unidad en grados)
Una dirección en el sentido de las agujas del reloj se informa como un valor positivo y un valor en el sentido contrario a las agujas del reloj se informa como un valor negativo.
En este ejemplo, el tren motriz girará hacia la izquierda durante 1 segundo antes de que su rotación actual se imprima en la pantalla del cerebro.
cuando empezó
[Turn towards the left for 1 second.]
turno [izquierda v]
esperar (1) segundos
[Print Drivetrain's current rotation after 1 second.]
imprimir (rotación de la unidad en grados) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Velocidad de conducción#
El bloque Velocidad de transmisión se utiliza para informar la velocidad actual del tren motriz.
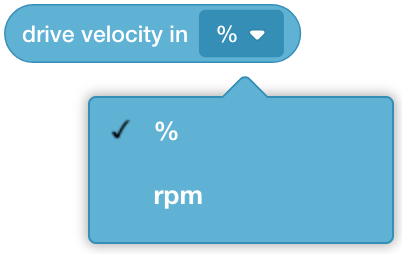
(velocidad de accionamiento en [% v])
El bloque Velocidad de conducción informa un rango de -100% a 100% o de -600 rpm a 600 rpm.
Seleccione las unidades en las que desea informar, porcentaje (%) o rotaciones por minuto (rpm).
En este ejemplo, el tren motriz avanzará durante 1 segundo antes de que su velocidad actual se imprima en la pantalla del cerebro.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print Drivetrain's current velocity after 1 second.]
imprimir (velocidad de accionamiento en [% v]) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Corriente de accionamiento#
El bloque Corriente de accionamiento se utiliza para informar la cantidad de corriente (potencia) que el tren motriz está utilizando actualmente.
(amperios de corriente de accionamiento)
En este ejemplo, el tren motriz avanzará durante 1 segundo antes de que su corriente se imprima en la pantalla del cerebro.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print Drivetrain's current after 1 second.]
imprimir (amperios de corriente de accionamiento) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Potencia de accionamiento#
El bloque Drive Power se utiliza para informar la cantidad de potencia de salida que el tren motriz está generando actualmente.
(potencia de accionamiento en vatios)
En este ejemplo, el sistema de transmisión avanzará durante 1 segundo antes de que su potencia actual se imprima en la pantalla del cerebro.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print Drivetrain's current power after 1 second.]
imprimir (potencia de accionamiento en vatios) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Par de accionamiento#
El bloque Drive Torque se utiliza para informar la cantidad de torque (fuerza rotacional) que el tren motriz está utilizando actualmente.
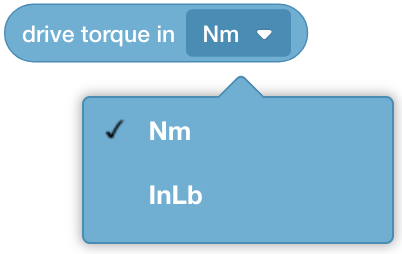
(par de accionamiento en [Nm v])
El bloque Drive Torque informa un rango de 0,0 a 18,6 pulgadas-libras (InLB) o de 0,0 a 2,1 Newton-metros (Nm).
Seleccione las unidades en las que desea informar, Nm o InLb.
En este ejemplo, el sistema de transmisión se moverá hacia adelante durante 1 segundo antes de que su torque actual se imprima en la pantalla del cerebro.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print Drivetrain's current torque after 1 second.]
imprimir (par de accionamiento en [Nm v]) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Impulsar la eficiencia#
El bloque Eficiencia de transmisión se utiliza para informar la eficiencia del tren motriz.
(eficiencia del variador en %)
El bloque Eficiencia de unidad informa un rango de 0% a 100%, determinado por el valor de la potencia (en vatios) que utiliza el motor (entrada), versus la cantidad de potencia (en vatios) que proporciona el motor (salida).
Un motor V5 normalmente alcanza una eficiencia máxima del 65 % en casos de uso normales.
En este ejemplo, el sistema de transmisión avanzará durante 1 segundo antes de que su eficiencia actual se imprima en la pantalla del cerebro.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print Drivetrain's current efficiency after 1 second.]
imprimir (eficiencia del variador en %) en [Brain v] ◀ y coloque el cursor en la siguiente fila
Temperatura de la unidad#
El bloque Temperatura de la unidad se utiliza para informar la temperatura de los motores inteligentes V5 que alimentan el tren motriz.
(temperatura de la unidad en %)
El bloque Temperatura de la unidad informa un rango de 0% a 100%.
En este ejemplo, el sistema de transmisión avanzará durante 1 segundo antes de que su temperatura actual se imprima en la pantalla del cerebro.
cuando empezó
[Drive forward for 1 second.]
unidad [adelante v]
esperar (1) segundos
[Print Drivetrain's current temperature after 1 second.]
imprimir (temperatura de la unidad en %) en [Brain v] ◀ y coloque el cursor en la siguiente fila